A method of exploration well sampling based on undisturbed soil exploration well sampling robot
A technology of robots and exploration wells, applied in the field of exploration well sampling based on undisturbed soil exploration well sampling robots, can solve problems such as increased hidden dangers, personal safety hazards for workers, hidden safety hazards, etc., and achieve good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
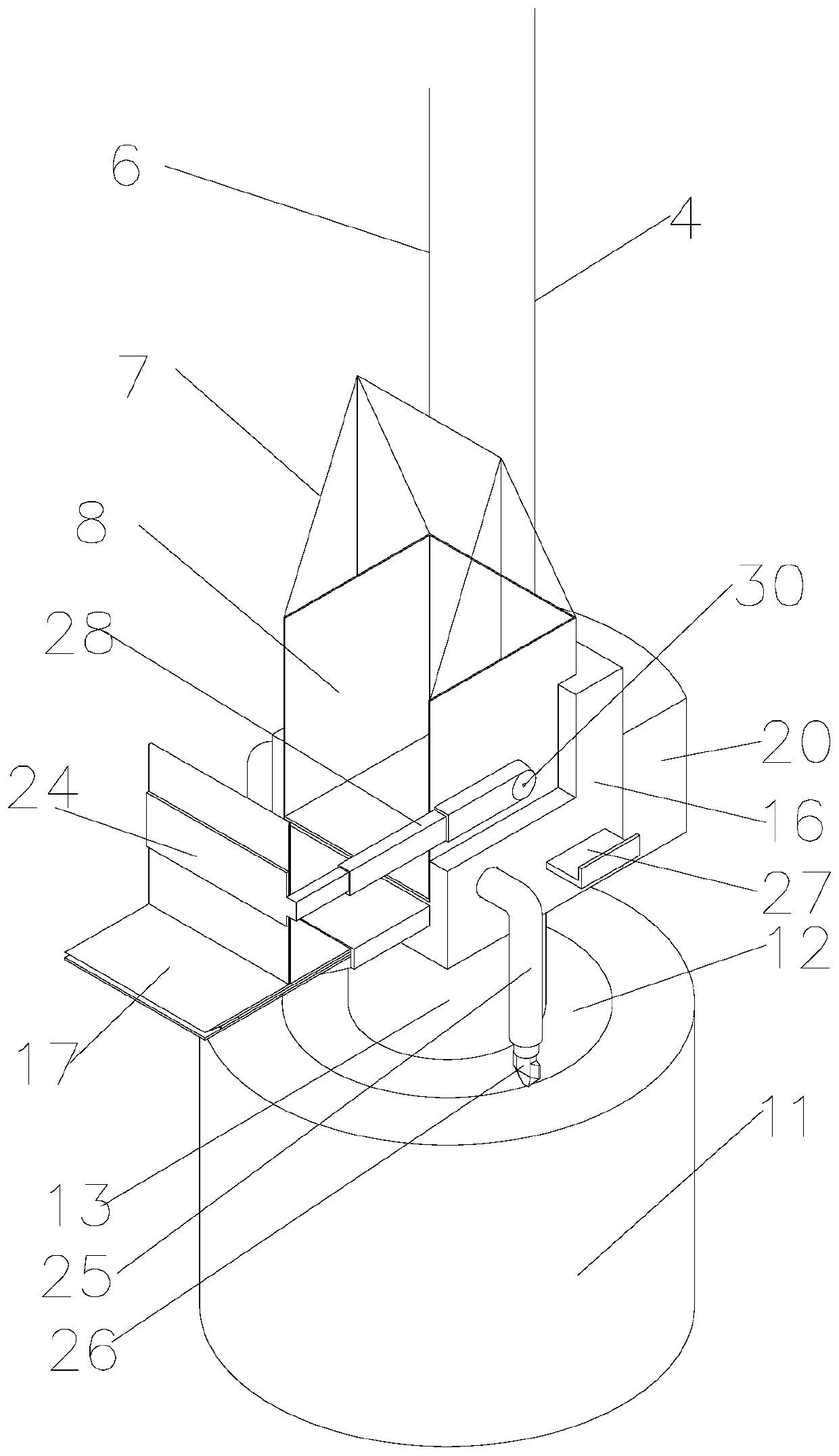
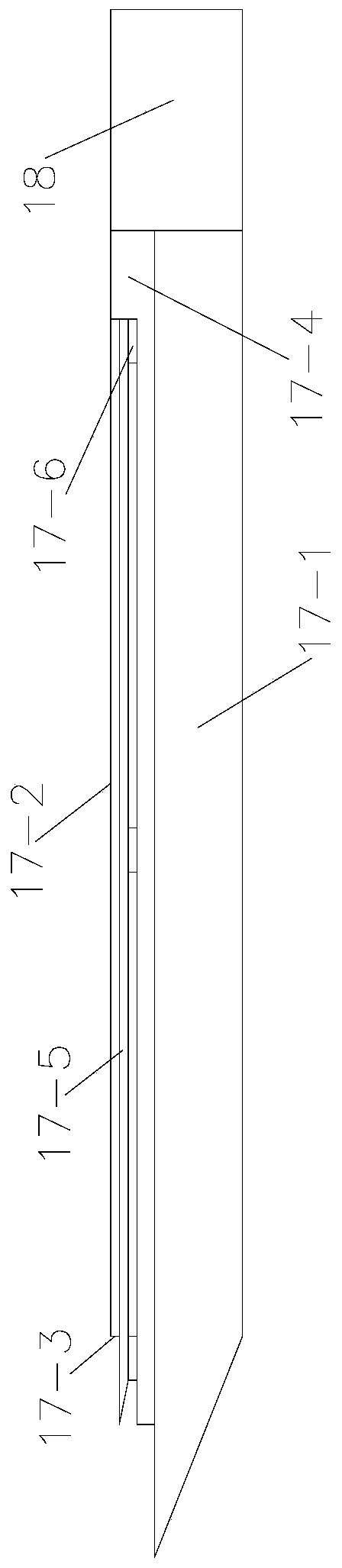
[0064] Such as Figure 1 to Figure 8 As shown, the present invention is based on an exploration well sampling method of an undisturbed soil exploration well sampling robot. The undisturbed soil exploration well sampling robot includes a first hoist 3 and a second hoist 5 installed on the ground, and cooperates with the first hoist 3 And extend into the sampling robot in the exploratory well 2 and cooperate with the second winch 5 and lower the sample frame 8 on the sampling robot, the sample frame 8 is a sample frame with the top and the front all open, and the sampling robot includes The base 9, the turntable 10 installed on the base 9 and the limit seat 12 of the hollow structure installed on the turntable 10 and used to limit the lifting path of the lifting column 13, the cross-sectional size of the base 9 and the turntable 10 is smaller than that of the exploration well 2 The cross-sectional size of the base 9 is provided with an annular structure on the circumferential en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com