


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method and device for route planning of unmanned aerial vehicle
A technology of unmanned aerial vehicles and airlines, which is applied in the field of unmanned aerial vehicles, can solve the problems of manual intervention and large errors, and achieve the effects of avoiding large errors, preventing accidents, and improving efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0042] A method for route planning of an unmanned aerial vehicle according to the present invention comprises the following steps:
[0043] Step S100: Obtain flight area and route parameters.
[0044] In one embodiment, the operator can operate on the satellite map through the display interface of the UAV ground control station. Preferably, the operator can manually select at least 3 waypoints on the satellite map, and connect several waypoints end to end. Together, a convex polygonal area is formed, which serves as the flight area of the drone. It should be noted that in this embodiment, selecting several waypoints and connecting the waypoints end to end to form a flight area is a common method for generating a flight area. Those skilled in the art can design and select a flight area in other ways, such as in Directly circle the area on the satellite map as the flight area.
[0045] Secondly, the operator edits the basic route parameters of the UAV in the flight area thro...
Embodiment 2
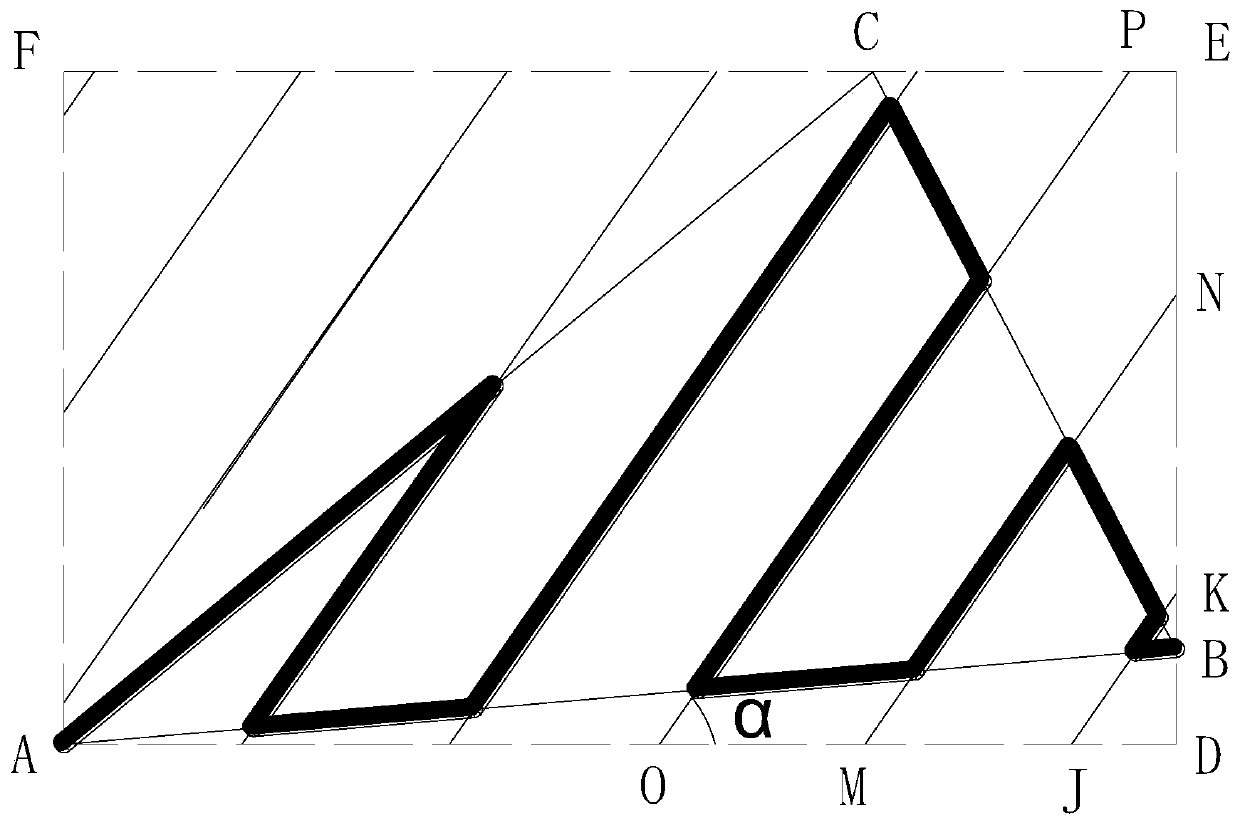
[0074] Such as figure 2 and image 3 As shown, it is another way of generating the flight route in the flight area in Embodiment 1.
[0075] The operator adjusts the direction of the flight path generated by the UAV according to the flight environment such as wind speed direction or electromagnetic field direction, which is used to improve the flight stability and endurance of the UAV.
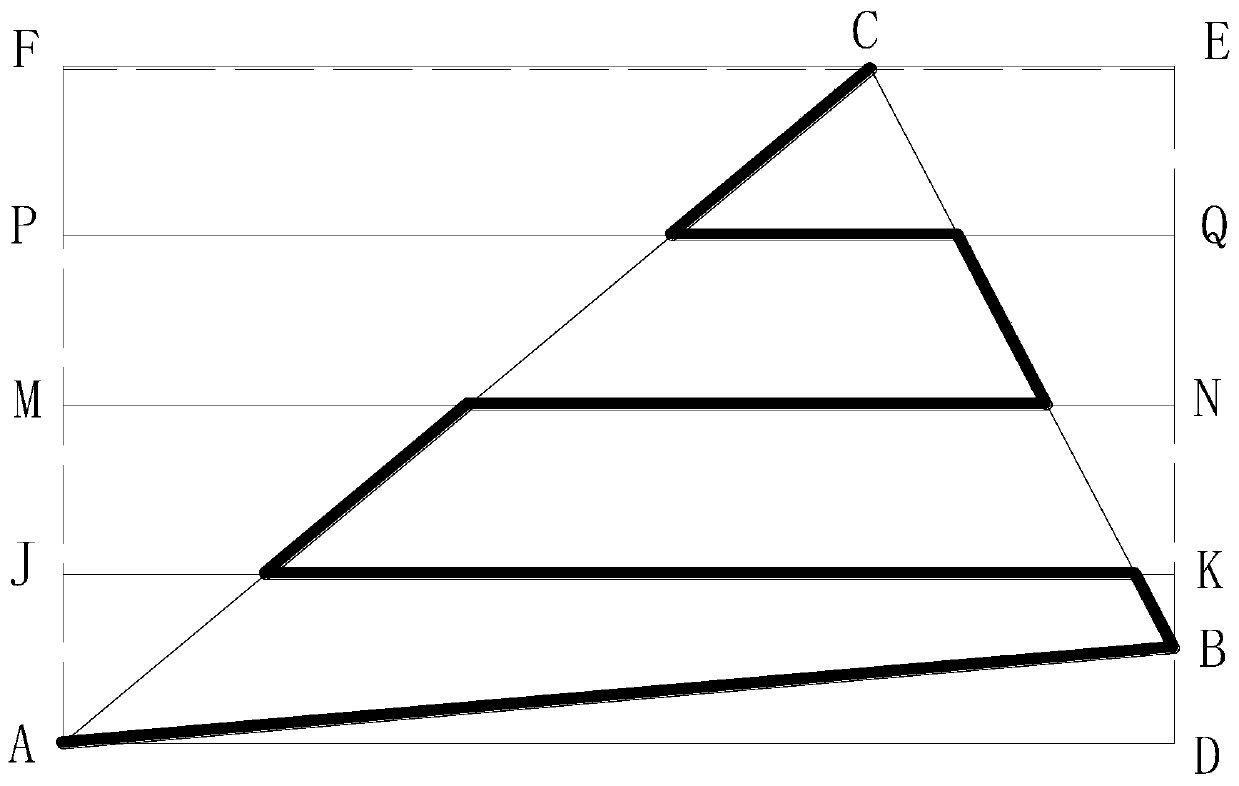
[0076] Specifically, the flight area is a triangle ABC, and the triangle ABC forms a minimum circumscribed rectangle ADEF through a similar algorithm based on rotation jamming.
[0077] The angle α formed by the flight direction of the drone and the horizontal axis is used as the deflection angle α of the flight of the drone, and the flight path formed by the drone in the rectangle ADEF according to the deflection angle α. In the rectangle ADEF, draw a number of straight lines with an angle α with the horizontal axis according to the distance between the routes, and intersect the sides of t...
Embodiment 3
[0081] Such as Figure 4 As shown, it is a schematic diagram of a flight route of another flight area described in the present invention.
[0082] The operator selects 6 waypoints that are not on the same straight line for the satellite map through the display interface of the ground control station, and every 3 waypoints are not on the same straight line, the 6 waypoints form a hexagonal ABCDEF, and the six waypoints are not on the same straight line. The polygon ABCDEF obtains the minimum circumscribed rectangle JKSR based on the similarity algorithm of rotation jamming, and the two long sides JK and RS of the rectangle overlap with the two sides AB and ED of the hexagon. The calculation module of the UAV calculates the route spacing according to the flight height edited by the operator and the degree of lateral overlap. The rectangular point J is used as the starting point of the route trajectory, and JK is a part of the route trajectory. Line segments MN and OP, etc., the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com