Monocular vision mileage measuring method and odometer based on image characteristics
A monocular vision and image feature technology, applied in the field of image processing, can solve the problem that the accuracy of triangulation reconstruction is not very high
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0050] Embodiment 1: The method for measuring mileage based on monocular vision based on image features is applied in vehicle-mounted tunnel detection equipment, and specifically includes the following steps:
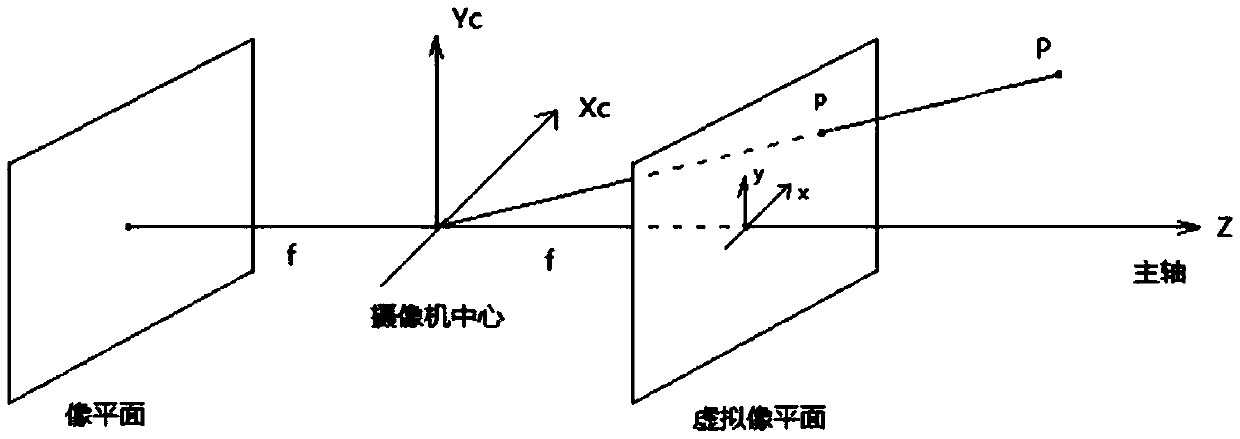
[0051] (1) First, the camera is calibrated to obtain the parameters of the camera;
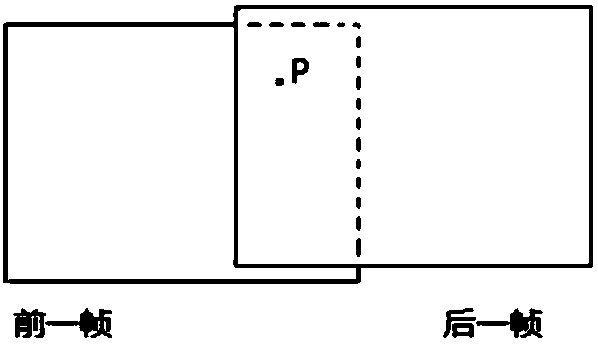
[0052] (2) Calculate the 2D feature points of the two frames before and after in the forward direction of the vehicle;
[0053] (3) matching the 2D feature points to find the corresponding feature points;
[0054] (4) Calculate the 3D coordinates of the feature points, and calculate the attitude according to the 3D coordinates and 2D coordinates of the feature points, and obtain the relative displacement;
[0055] (5) Take the same method for subsequent measured frames in turn, calculate the displacement of the camera relative to the previous frame when shooting each frame, and finally accumulate all the displacements to obtain the mileage;
[0056] Such as figure 1 As shown, the che...
Embodiment 2
[0080] Embodiment 2: the method for the monocular vision measurement mileage based on image features, specifically comprises the following steps:
[0081] 1) According to the checkerboard calibration algorithm, the camera is calibrated to obtain the internal parameters of the camera;
[0082] 2) Calculate the image features for the two frames before and after: first construct the image pyramid, and on each layer, extract the pixel point with a larger difference with the pixel point in the surrounding area as the key point; select point pairs around the key point, and pass Compare pixel values to generate descriptors; adjust the descriptor according to the angle between the key point and the gray centroid, so that the descriptor has rotation invariance; finally obtain the descriptor of the image feature;
[0083] 3) Match the feature points on the two frames before and after to obtain the corresponding feature points: build a k-d tree for the feature point set on the image: s...
Embodiment 3
[0112] Embodiment 3: the method for the monocular vision measurement mileage based on image features, specifically comprises the following steps:
[0113] 1) According to the checkerboard calibration algorithm, the camera is calibrated to obtain the internal parameters of the camera;
[0114] 2) Calculate the image features for the two frames before and after: first construct the image pyramid, and on each layer, extract the pixel point with a larger difference with the pixel point in the surrounding area as the key point; select point pairs around the key point, and pass Compare pixel values to generate descriptors; adjust the descriptor according to the angle between the key point and the gray centroid, so that the descriptor has rotation invariance; finally obtain the descriptor of the image feature;
[0115] 3) Match the feature points on the two frames before and after to obtain the corresponding feature points: build a k-d tree for the feature point set on the image: s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com