Multiple target type oriented mechanical arm self-adaptive grabbing method
A robotic arm, multi-target technology, applied in the field of intelligent robots, can solve problems such as manual intervention, inability to meet changes in the type of target objects, and inability to adjust the type of target objects adaptively, so as to reduce the cost of debugging and modification.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with the accompanying drawings and embodiments.
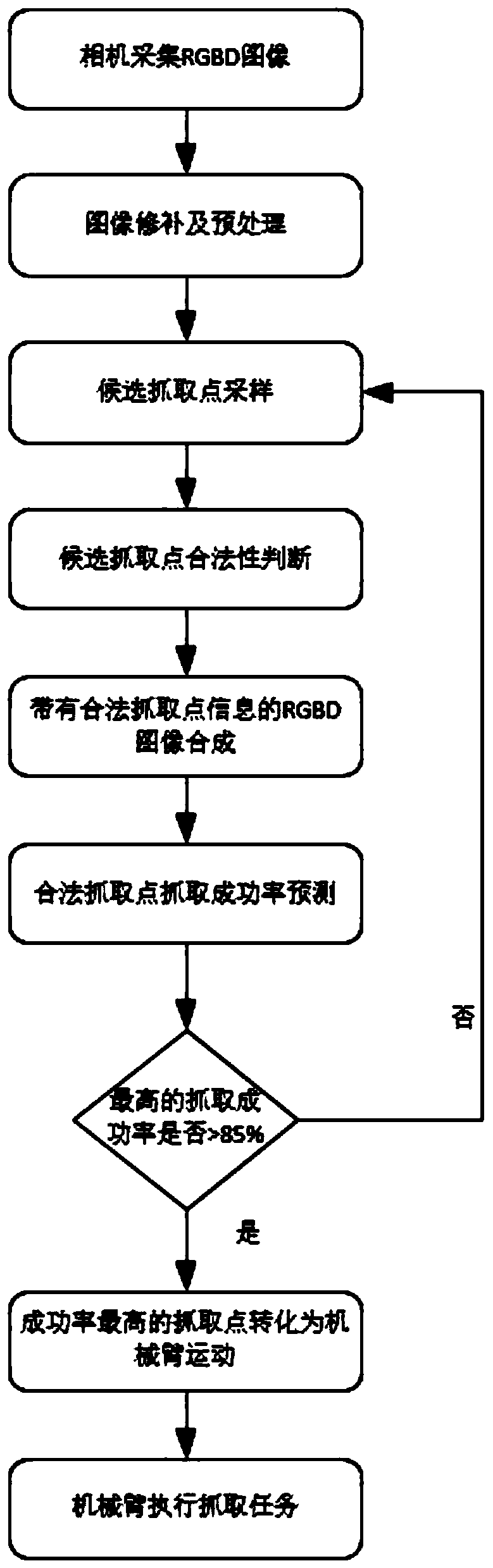
[0051] Such as Figure 1 to Figure 4 As shown, a method for adaptive grasping of a robotic arm for multi-target types includes the following steps:
[0052] (1) Image acquisition and image preprocessing are carried out first.
[0053] Specifically, the RGBD camera or depth camera fixed at the end of the robot arm is used to obtain the depth image and color image in the scene at a distance of about 0.7m from the object. The depth image contains the spatial state information of the object to be captured in the scene, The pixel value corresponding to each pixel in the depth image represents the distance between the sensor and the object to be captured, and the color image contains surface color information and texture informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com