A system and a method for an intelligent unmanned aerial vehicle to grab a target for a high-risk environment
A high-risk environment, unmanned aerial vehicle technology, used in manipulators, motor vehicles, transportation and packaging, etc., can solve problems such as inaccurate positioning, GPS signal loss, collision obstacles, etc., achieving a high degree of automation, high safety factor, and high efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and effect of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings.
[0044] The present invention mainly belongs to the technical field of unmanned aerial vehicles, and relates to the basic problems of aerial robots, including the self-positioning of unmanned aerial vehicles, path planning, etc., and also relates to the technology of image processing, including target detection and target positioning. The robotic arm also involves some techniques in mechanical dynamics.
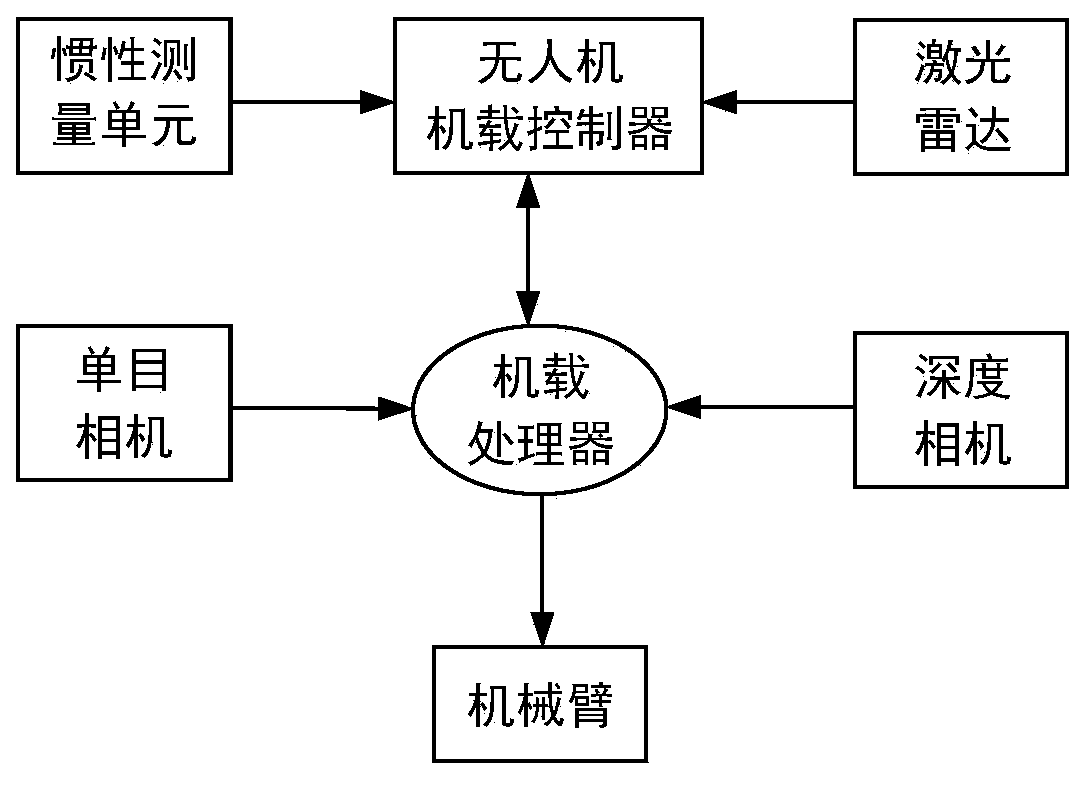
[0045] Such as figure 1 As shown, the present invention provides a system for capturing targets by an intelligent drone, including a multi-rotor drone, an onboard processor mounted on the drone, a depth camera, a monocular camera, an inertial measurement unit, an airborne Controller, lidar, and robotic arm and center of gravity compensation unit;
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com