UAV operating method and system
A technology for drones and operations, applied in the field of drones, to improve reusability and usability, reduce development difficulty and cost, and simplify control logic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] This embodiment discloses a method for operating an unmanned aerial vehicle, which includes the following contents:
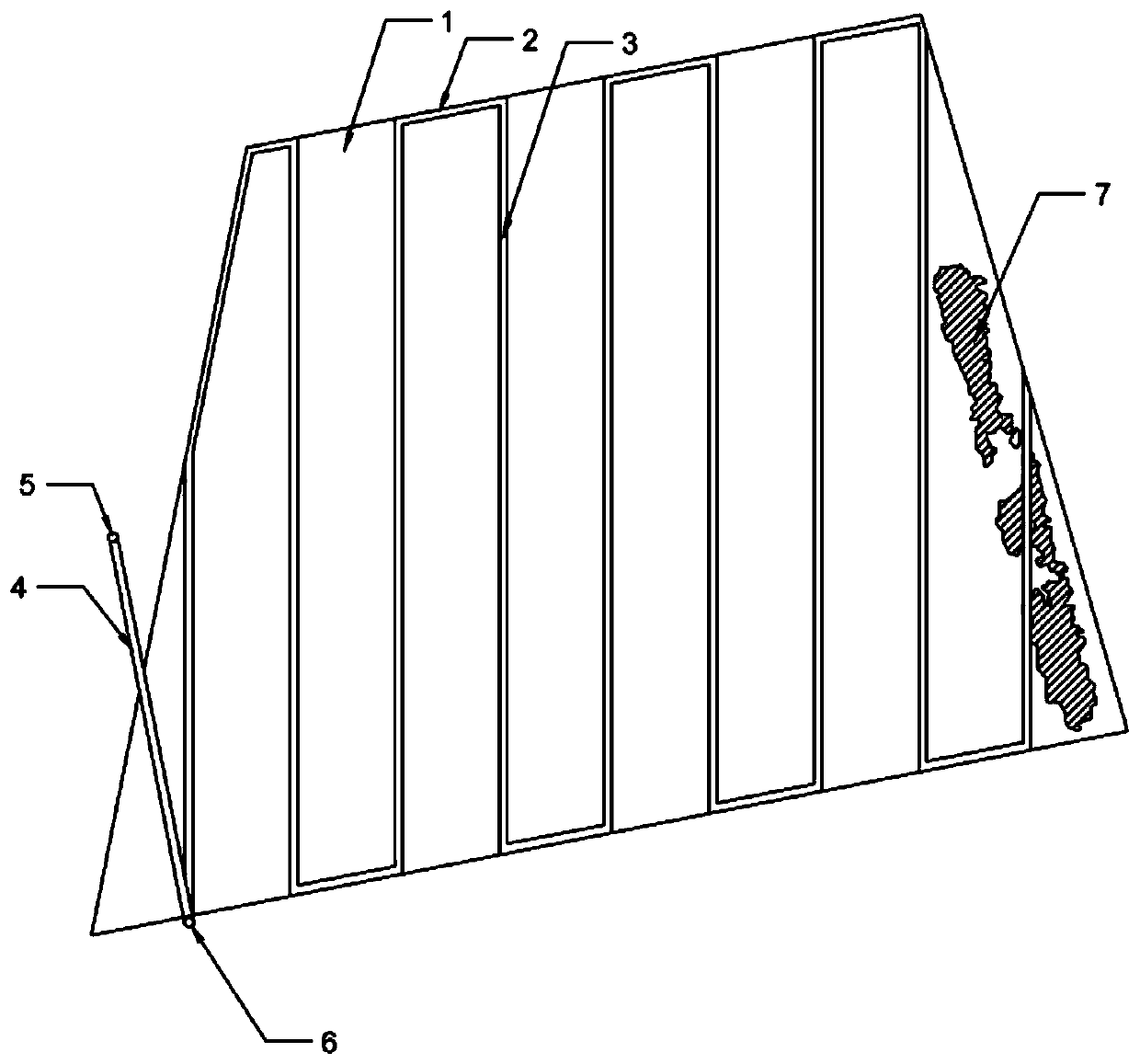
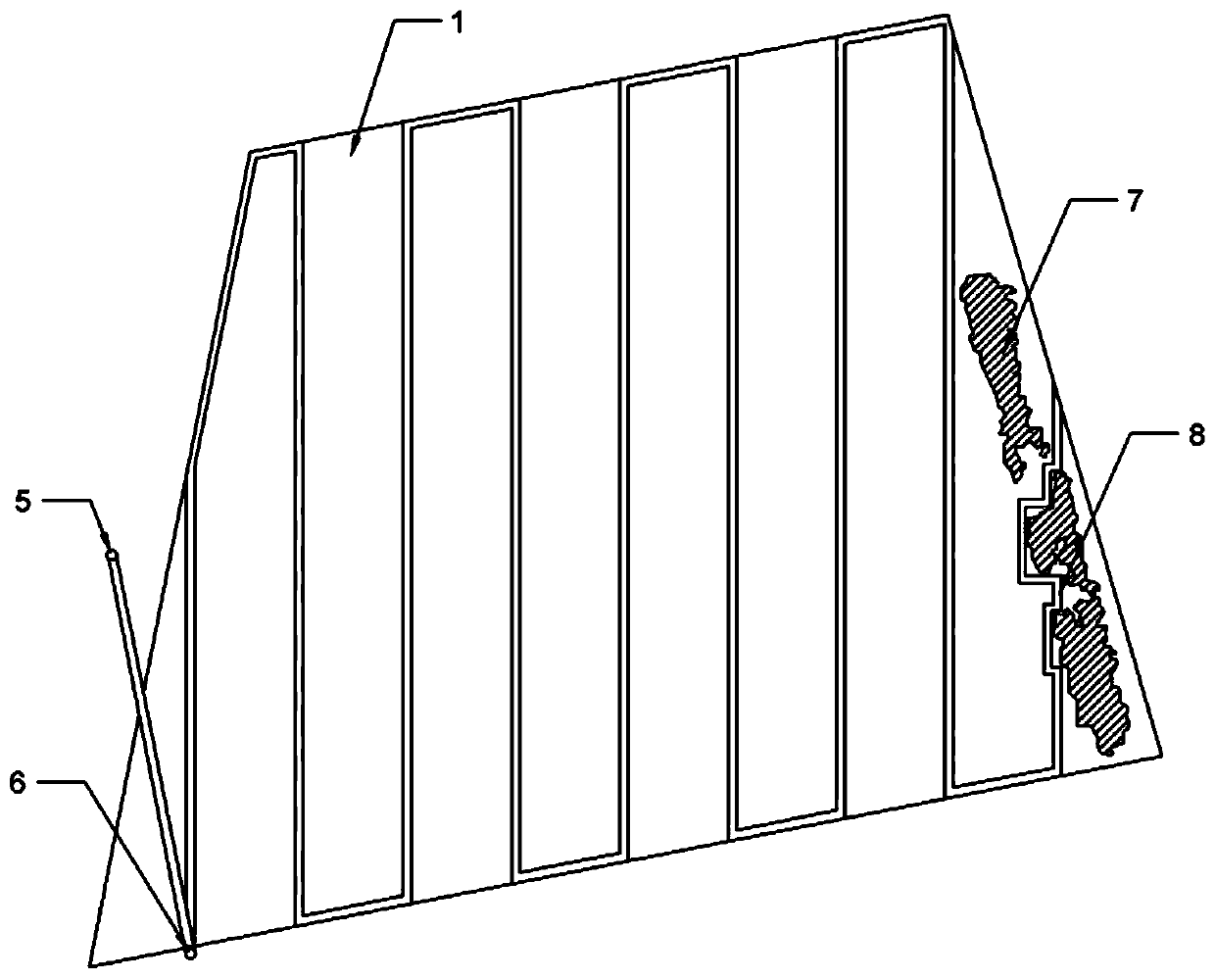
[0049] Acquire and process the spatial three-dimensional data of the operation area 1, and generate the spatial three-dimensional data model of the operation area 1;
[0050] Generate the flight path of the UAV according to the starting position of the UAV, parameter settings and the spatial three-dimensional data model of the operation area 1;
[0051] UAVs fly and operate according to the flight path.
[0052] Perform the following steps when processing the spatial 3D data of the operating area 1:
[0053]According to the delimited operation boundary, obtain the average height of the crops in the operation area 1;
[0054] Subtract the average height of the crops from the height of the area corresponding to the crop range, and add the actual height of the current crops in the area to obtain the current actual spatial three-dimensional data model of t...
Embodiment 2
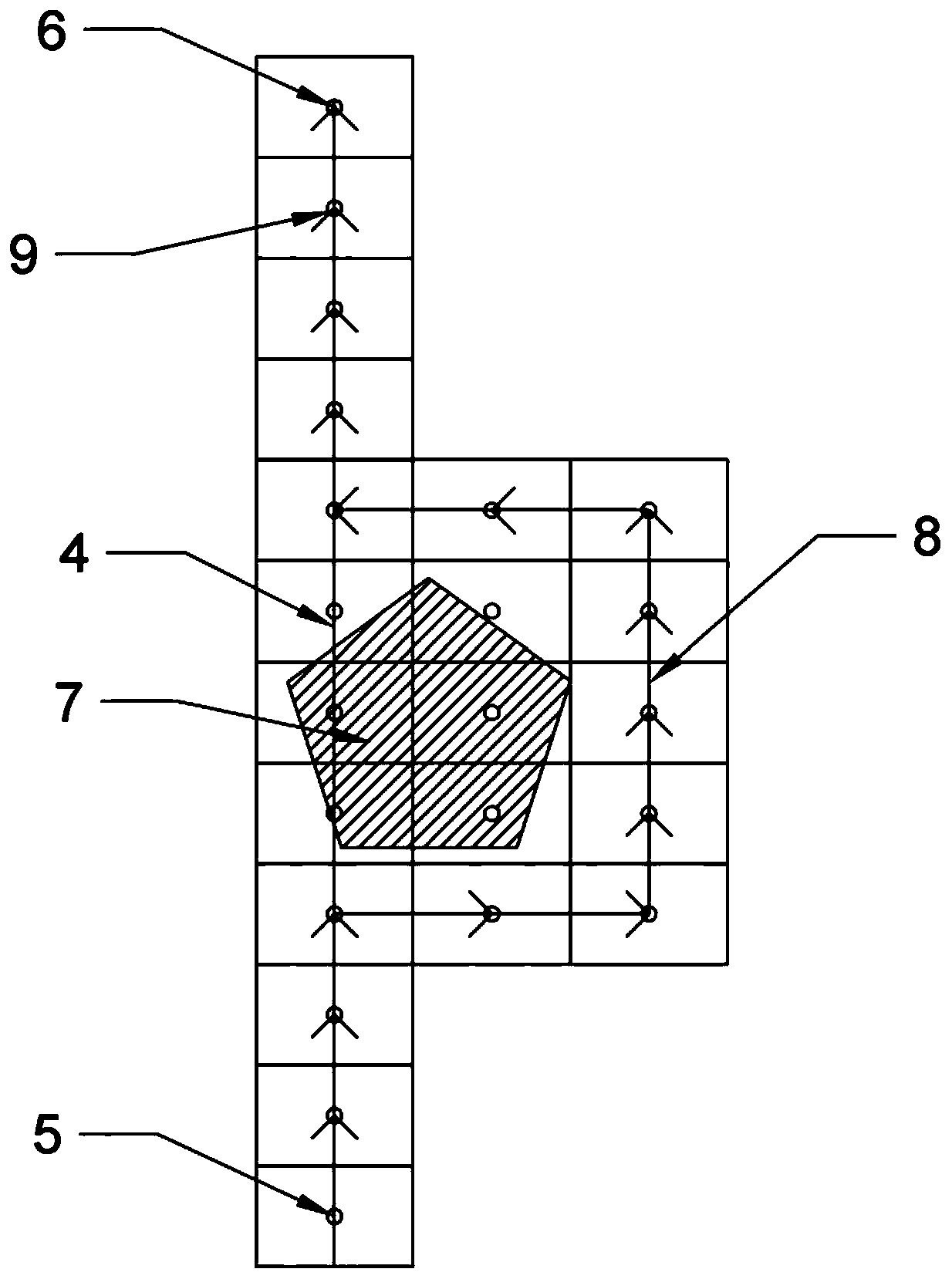
[0095] The difference between this embodiment and the embodiment is: when the operation path is generated, if there is no offset between the current waypoint and the initial two-dimensional route in S100, it will also be judged whether the current course is a direction close to the initial two-dimensional route, If the current heading is a direction close to the initial two-dimensional flight path, then make the current heading the opposite direction of the initial two-dimensional flight path. Specifically, if the current heading is close to the direction of the initial two-dimensional flight path, then perform S500: adjust the current heading to a direction opposite to the direction of the initial two-dimensional flight path, and generate the next waypoint 9 at a preset interval along the current heading; Determine whether the next waypoint 9 is a flyable waypoint 9, if the next waypoint 9 is a flyable waypoint 9, mark the next waypoint 9 as the final waypoint, and make the ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com