High-altitude high-speed unmanned aerial vehicle landing and grounding state control method
A technology of grounding state and control method, applied in attitude control, three-dimensional position/course control, etc., can solve problems such as slow change of lift speed, small lift acceleration, and landing action lag, and meet design requirements, meet performance requirements, and realize The effect of a safe and smooth landing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
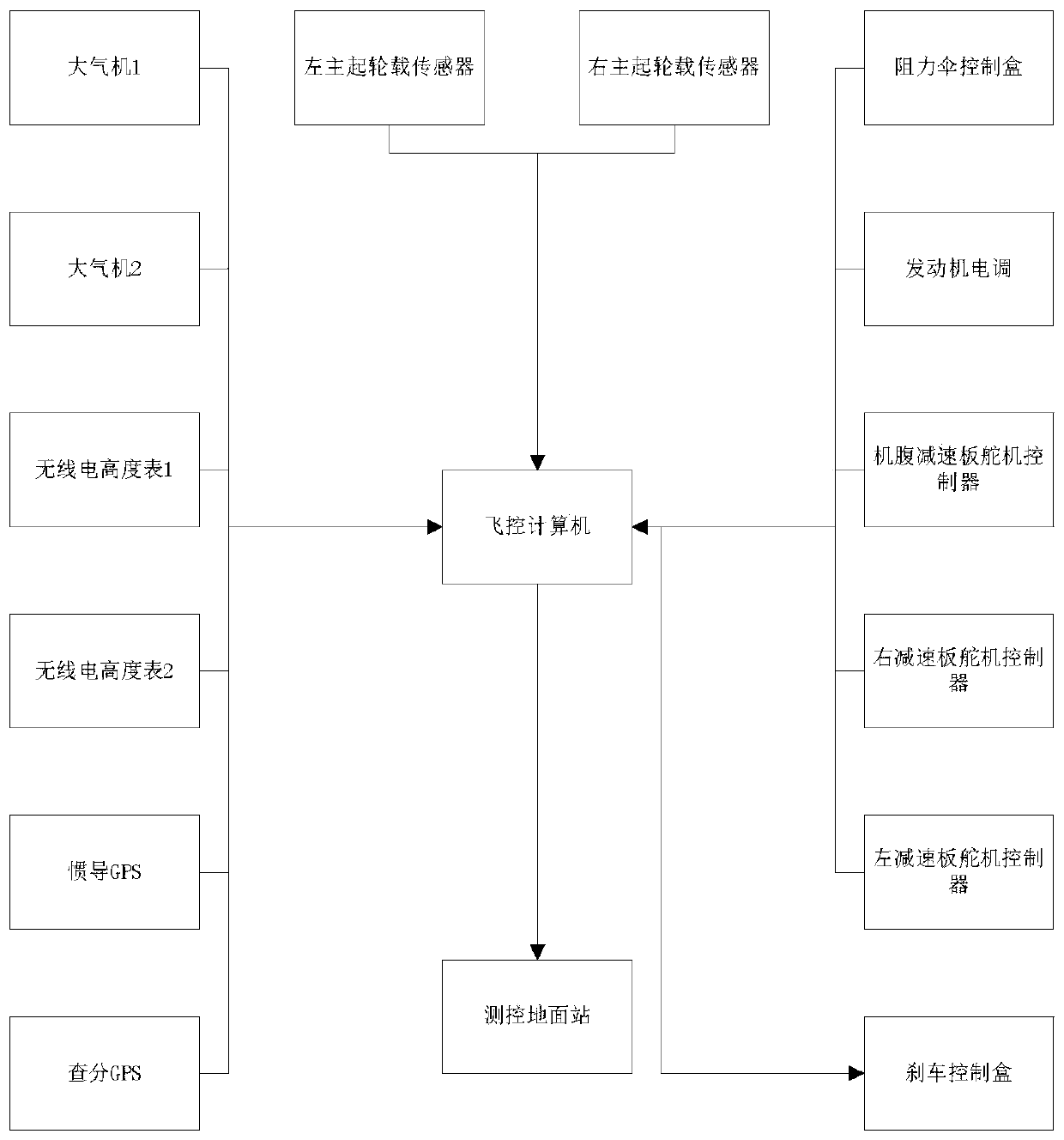
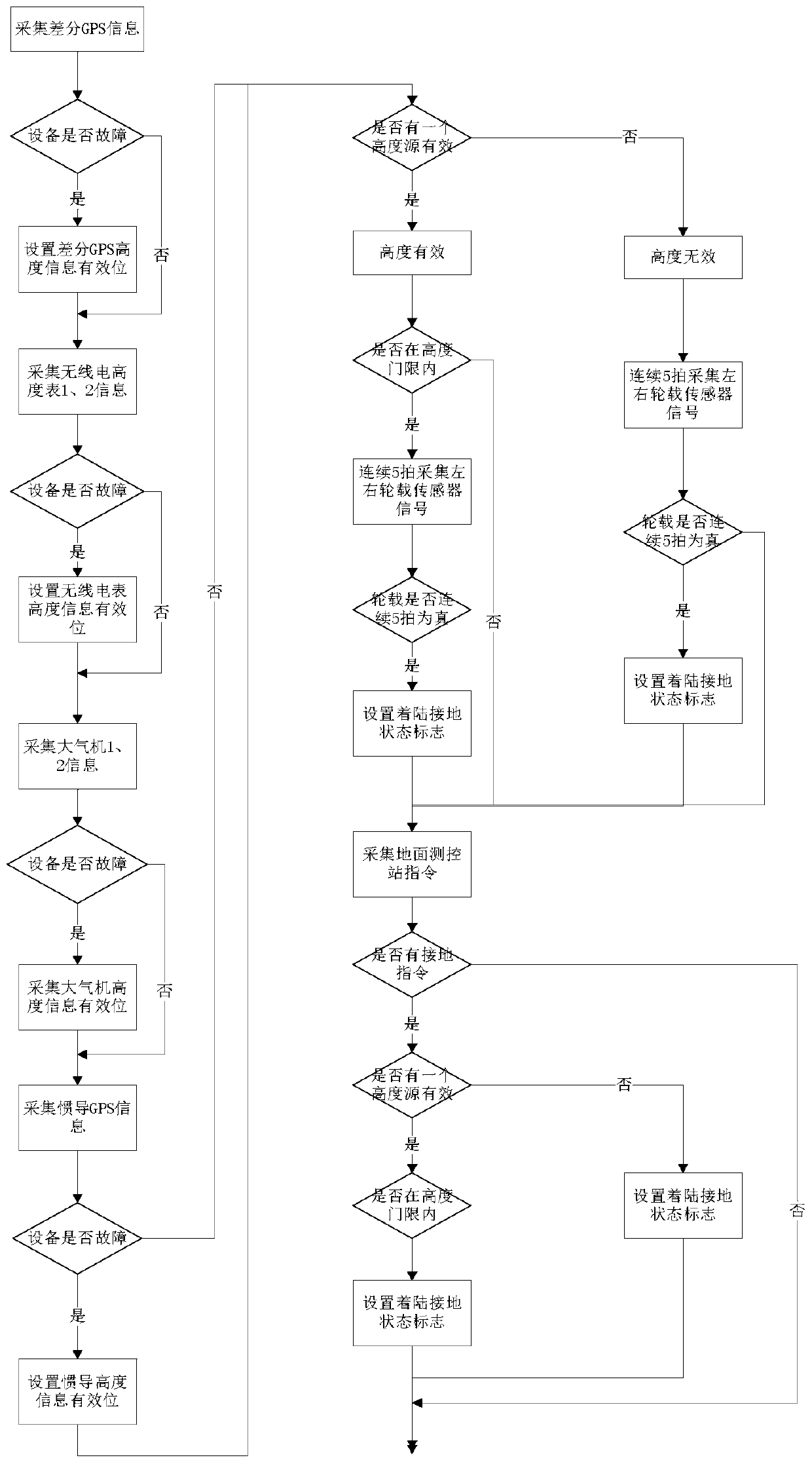
[0011] refer to figure 1 , figure 2 . According to the present invention, the high-altitude high-speed autonomous take-off and landing type UAV landing control system collects differential GPS information through the flight control computer, the altitude values of the inertial navigation GPS, the atmospheric engine 1, the atmospheric engine 2, the radio altimeter 1, and the radio altimeter 2 and Validity signal, to determine whether the equipment is faulty, if yes, set differential GPS, inertial navigation GPS, radio altimeter 1, radio altimeter 2, and effective bit information of atmospheric machine altitude information, otherwise return to determine whether the equipment is faulty; according to differential GPS, The altitude value and validity signal of the inertial navigation GPS are used to judge whether there is an altitude source that is valid. If the altitude is valid, it is judged whether it is within the altitude threshold. If it is true for 5 consecutive shots, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com