Random waveform reproduction control method for valve-controlled cylinder electro-hydraulic position servo system
An electro-hydraulic position servo and control method technology, which is applied in the mechanical field, can solve problems that affect the waveform control accuracy, and it is difficult to ensure the convergence of impedance identification results, so as to achieve the effect of ensuring convergence and improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
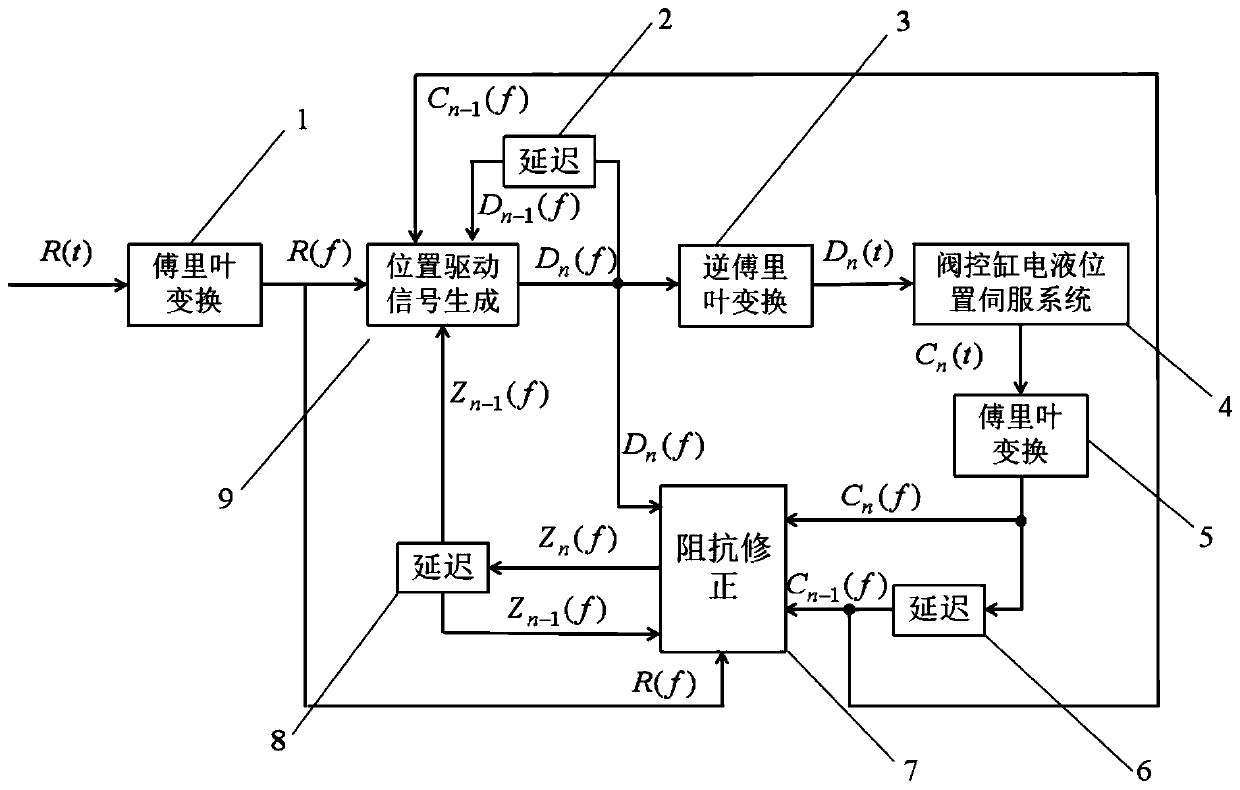
[0032] The present invention will be further described below in conjunction with the accompanying drawings. Such as figure 1 As shown, a random waveform reproduction control method of a valve-controlled cylinder electro-hydraulic position servo system includes the following steps:
[0033] A. Set the initial value of the number of iterations n, let n=1.
[0034] B. Set the position time-domain random wave reference signal as R(t), transform R(t) into R(f) through the Fourier transform module A1, and R(f) is the Fourier of the position time-domain random wave reference signal The leaf transform signal is the position frequency domain reference signal.
[0035] C. Combine R(f), D n-1 (f), C n-1 (f) and Z n-1 (f) input to the position driving signal generating module 9, and calculate the frequency domain driving signal D during the nth iteration n (f), the calculation formula is:
[0036]
[0037] Symbols in the formula Indicates the Hadamard product; D n-1 (f) is th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com