Cleaning robot and control method thereof
A technology of cleaning robot and control method, applied in the field of smart home, can solve the problems of inability to detect whether there is an obstacle above the top of the cleaning robot, the user cannot find it in time and accurately, and the cleaning robot cannot be recharged and recharged autonomously.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
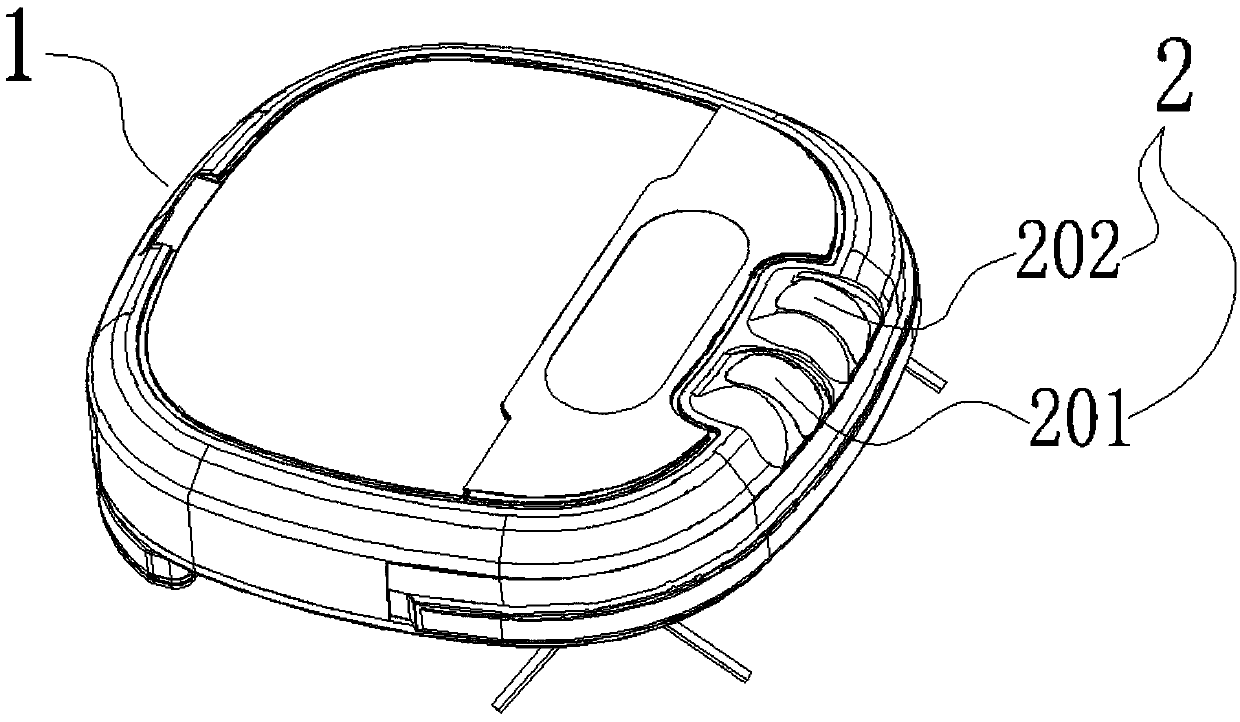
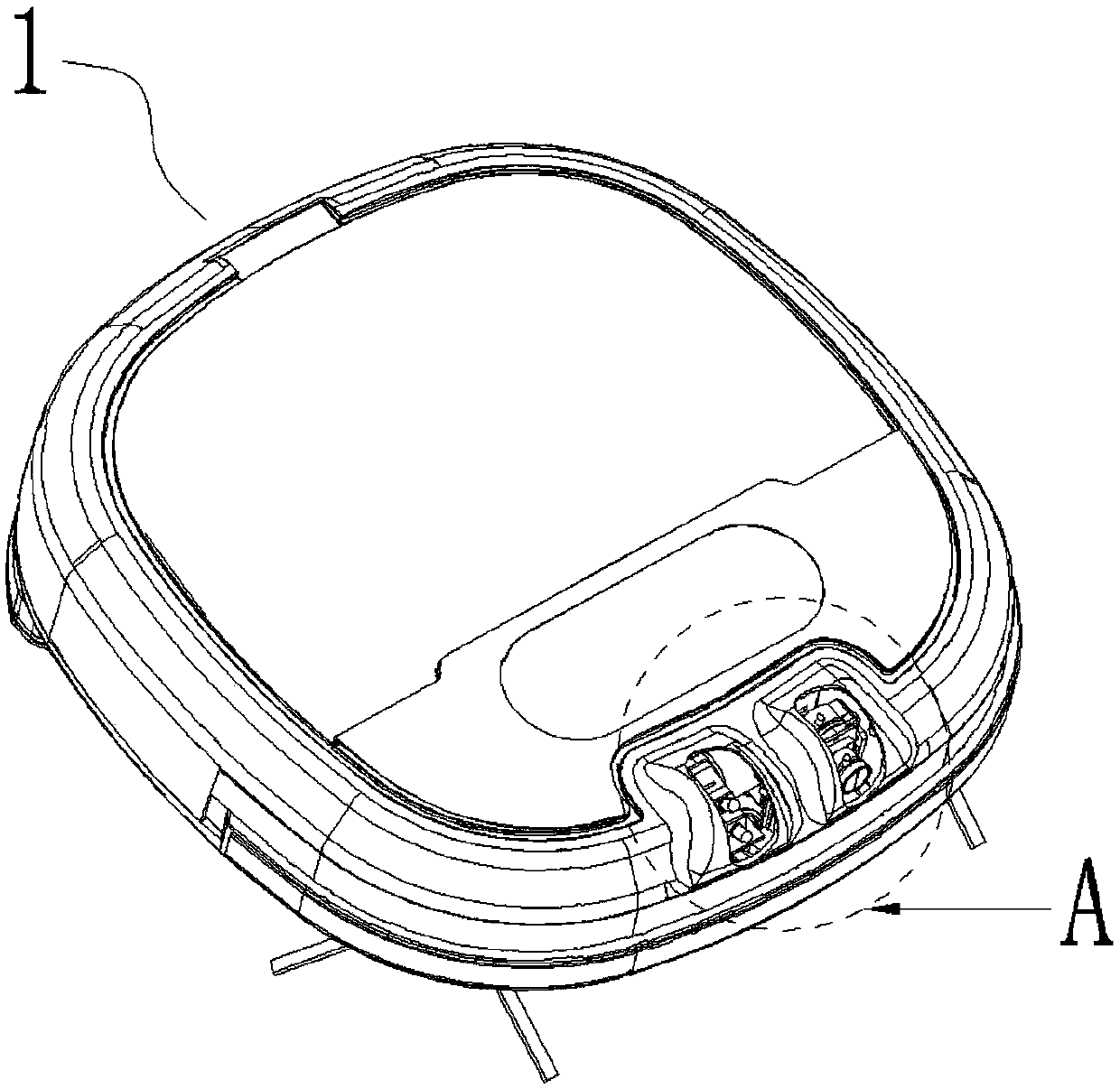
[0039] Embodiment: cleaning robot 1 of the present invention, as Figure 1 to Figure 12 As shown in the composition, it includes: a walking unit, a control unit, a dust collection unit, a display unit, a voice unit, and a collision detection unit. The cleaning robot 1 is provided with at least one obstacle detection device for detecting the position data of obstacles in the cleaning area. Unit 2, the obstacle detection unit 2 is installed on the top of the front side of the cleaning robot 1 and is connected to the control unit, the obstacle detection unit 2 includes a first detection module 201 for detecting whether there is an obstacle in front of the cleaning robot 1 and for A second detection module 202 that detects whether there is an obstacle above the top of the cleaning robot 1 .
[0040] The first detecting module 201 comprises the first transmitting part 2011 of transmitting level detecting signal and the first receiving part 2012 receiving the level detecting signal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com