A driving route trajectory generation system for unmanned low-speed vehicles
A trajectory generation and route technology, applied to road network navigators, etc., can solve the problems of route accuracy cannot be guaranteed and navigation accuracy is low, so as to ensure real-time matching, save data storage space, ensure accuracy and reliability sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
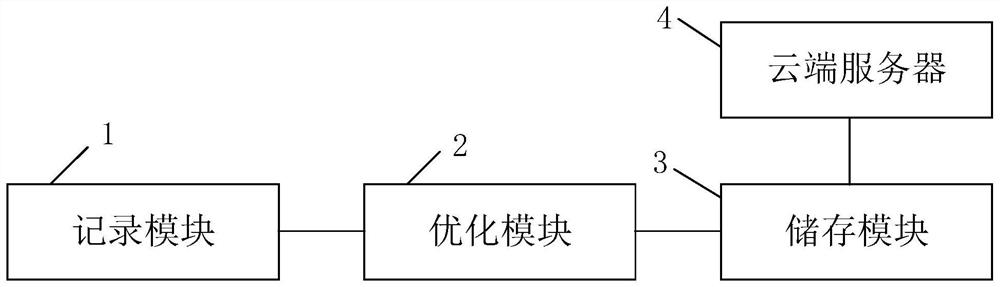
[0029] like figure 1 As shown, the present embodiment provides a driving route trajectory generation system for unmanned low-speed vehicles, including: a recording module 1: used to record the driving route during driving, and store it; an optimization module 2 for The stored driving route is optimized, and the corrected driving route is generated and stored; the storage module 3 is used for storing the driving route and the corrected driving route.
[0030] 1. Recording module
[0031] The recording module 1 includes a navigation unit and a vision unit. The navigation unit is used to locate the coordinates, and record the positioning coordinates to generate a driving route. The invention patent combines various existing navigation and positioning systems, such as GPS, inertial navigation, etc., to accurately locate the route of the unmanned vehicle for accurate record storage.
[0032] The vision unit is used to collect road information around the route, generate feature m...
Embodiment 2
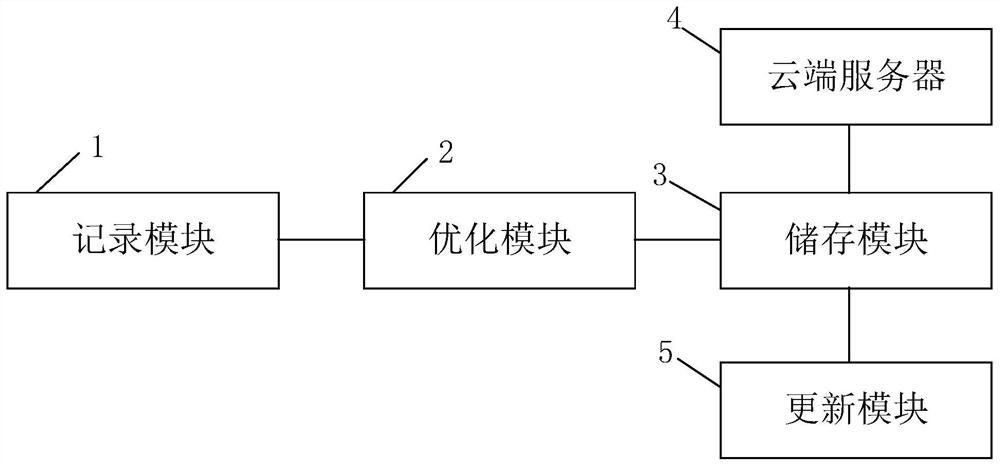
[0040] like figure 2 As shown, this embodiment provides a driving route trajectory generation system for unmanned low-speed vehicles, including a recording module 1, an optimization module 2, a storage module 3 and a cloud server 4, and its functions and results are the same as those in Implementation 1. This embodiment also includes an update module 5 connected to the storage module 3 .
[0041]The update module 5 keeps the open state when the vehicle is running, and judges whether the newly generated route of the vehicle is the corrected driving route stored in the route storehouse (in the cloud server 4 or the storage module 3), if so, then the driving route around the driving route The road information is supplemented and replaced; if not, then it is judged as a new route, which is stored and last time in the storage module 3. The specific steps are: the newly generated vehicle driving route is compared with the existing information of the road section in the storage mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com