Robot vision inertial point linear feature positioning method and device
A technology of robot vision and feature location, applied in the field of robot navigation, which can solve the problems of difficult repeated detection of feature points, error matching rate of feature points, changes in perspective and climate change, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In the following, the technical solutions of the present invention will be further described in conjunction with the drawings and specific implementation methods.
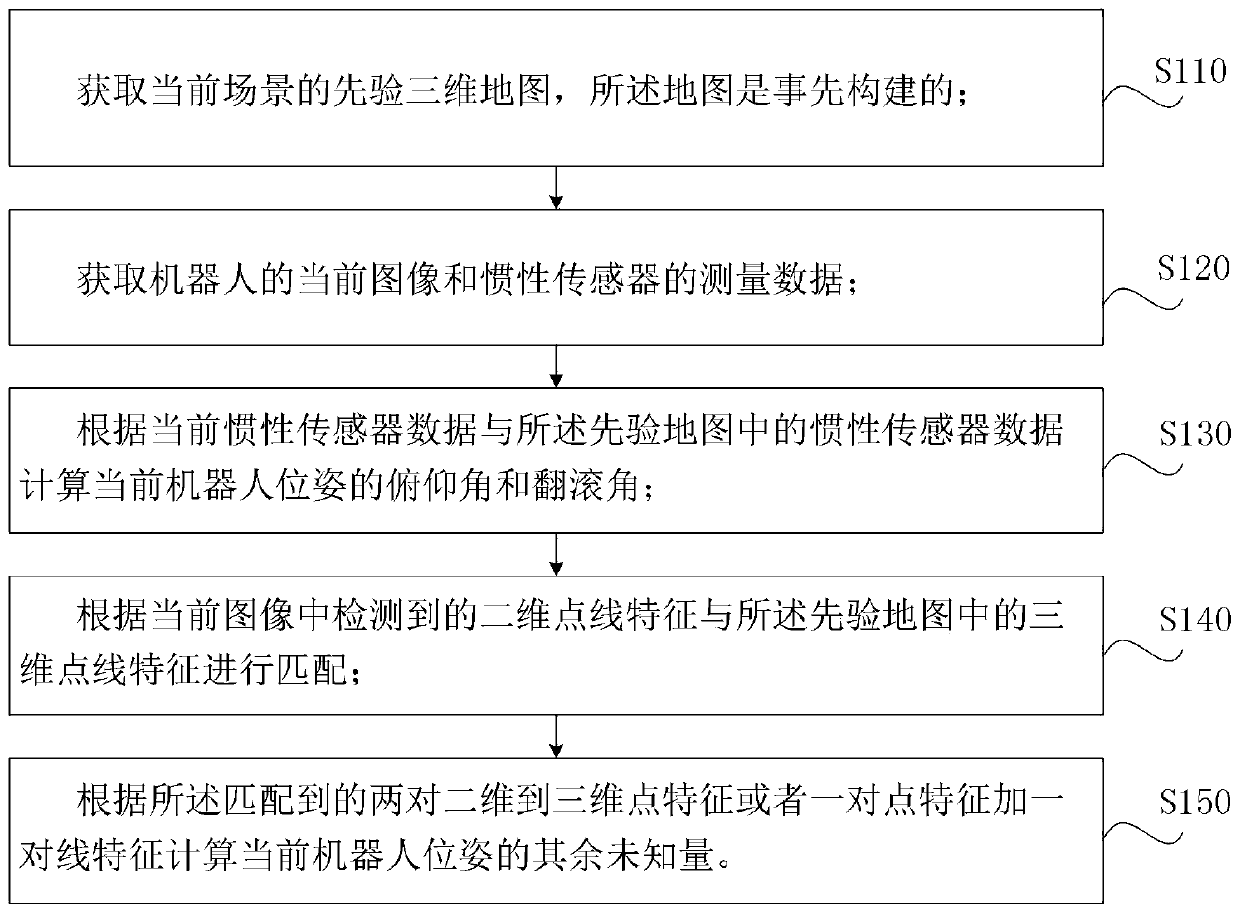
[0064] figure 1 It is a schematic flow chart of the robot visual inertial point and line feature positioning method of the present invention. The present invention discloses a robot visual inertia point line feature positioning method, which includes the following steps:
[0065] 1. Obtain a priori three-dimensional map of the current scene, the map is constructed in advance, and the map is required to include the measurement data of the acceleration of gravity in the map coordinate system, which is generally measured by an inertial sensor, specifically when determining the map coordinate system At the same time, the acceleration data measured by the inertial sensor is saved; the three-dimensional map also includes three-dimensional point-line features, so that it can be matched with the two-dimensional poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com