System for controlling roll stability of high-clearance vehicle based on grey prediction fuzzy PID algorithm
A technology of stability control and gray prediction model, which is applied to controllers with specific characteristics, electric controllers, etc., can solve the problems of difficult control systems and difficult establishment of accurate mathematical models for system characteristic information, so as to improve accuracy and improve The effect of PID controller and the effect of adapting to complex working environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
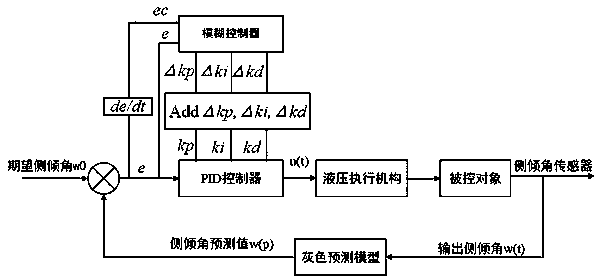
[0037] Embodiment 1: In this embodiment, a high ground clearance vehicle roll stability control system based on gray prediction fuzzy PID algorithm is applied to the operation stability control of high ground clearance agricultural vehicles. The control system mainly includes vehicle load, Hydraulic actuator, roll angle sensor, grey prediction model, fuzzy control model and PID controller;
[0038] Such as figure 1 As shown, the principle of the control system in the present invention is as follows:
[0039] The roll angle sensor obtains the high ground clearance vehicle load centroid roll angle signal w(t) at the sampling time t and transmits it to the gray prediction model for relevant calculations;
[0040] The gray prediction model obtains the predicted value of the roll angle w(p) after calculation and compares it with the expected value of the system roll angle w0 to obtain the difference e;
[0041] After the fuzzy control model receives the signal input of the difference e, it...
Embodiment 2
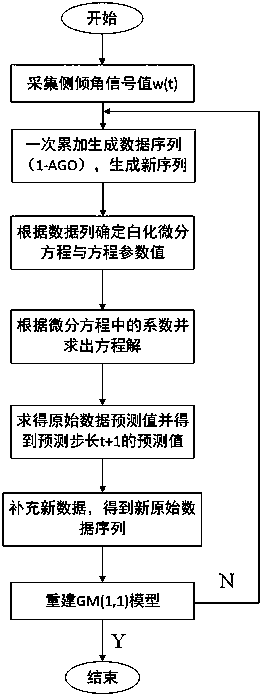
[0044] Embodiment 2: In this embodiment, the gray prediction model in the high ground clearance vehicle roll stability control method based on the gray prediction fuzzy PID algorithm is used to cumulatively calculate the system roll angle measurement value w(t) and output the corresponding prediction value w(p), the algorithm flow chart is as figure 2 As shown, the specific algorithm flow is carried out as follows:
[0045] Step 1. Obtain the vehicle load centroid roll angle signal w(t) according to the roll angle sensor, and accumulatively collect 4 data signals for calculation, which is used to establish a four-dimensional innovation GM(1,1) predictive model, and the set can be measured The original data sequence of the system roll angle output time is as follows:
[0046] (1)
[0047] Step 2. Since the original data sequence is the gray information data sequence of the system, it can be generated by accumulating the data sequence once (1-AGO), as shown in formula (2):
[0048] ...
Embodiment 3
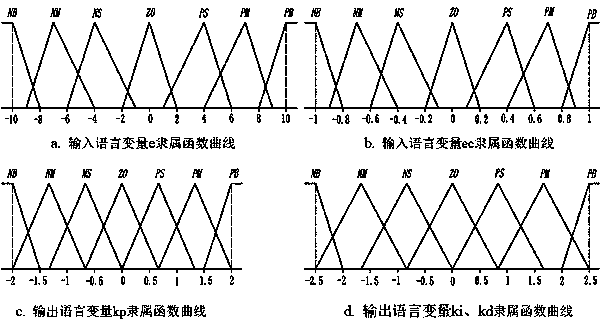
[0060] Embodiment 3: In this embodiment, the fuzzy control model in the high ground clearance vehicle roll stability control method based on the gray prediction fuzzy PID algorithm mainly includes the determination of the membership function and the fuzzy inference rules.
[0061] The membership function curve is like image 3 As shown, the roll angle error e and roll angle velocity error ec are set as the input language variables of the system, and the PID control parameter adjustments Δkp, Δki, and Δkd are used as the output language variables of the system to determine the domain of system input and output language variables; system input The fuzzy subsets of output language variables are defined as {NB, NM, NS, ZO, PS, PM, PB}, where the language variables are NB (negative large), NM (negative medium), NS (negative small), ZO (Zero), PS (positive small), PM (positive middle), PB (positive big).
[0062] The formulation of fuzzy inference rules mainly relies on the influence of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com