Recyclable rocket landing working condition simulation equipment based on rope drive parallel robot
A technology of working condition simulation and robotics, which is applied in the aerospace field, can solve the problems that the rocket process cannot be simulated and verified, and the landing conditions of the recoverable rocket cannot be simulated.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
[0014] Specific implementation mode one: combine Figure 1 to Figure 6 Describe this embodiment, a kind of retrievable rocket landing condition simulation equipment based on a rope-driven parallel robot in this embodiment, it includes an attitude control device, a suspension unlocking mechanism and a measuring device, and the attitude control device includes a support frame 1 and a plurality of Drive unit, a plurality of drive units are installed on the eight corners of the support frame 1; the measuring device includes an operation control machine 7 and an impact acceleration test platform 10, the impact acceleration test platform 10 is installed in the support frame 1, and the operation control machine 7 is respectively Control the action of the drive unit and the suspension unlocking mechanism, the suspension unlocking mechanism is installed on the impact acceleration test platform 10; the suspension unlocking mechanism includes a suspension release mechanism 8 and a landing...
specific Embodiment approach 2
[0020] Specific implementation mode two: combination Figure 1 to Figure 2 Describe this embodiment, the driving unit of this embodiment includes a drive motor 2 and a rope winding mechanism, the rope winding mechanism includes a coupling 3, a rope winding rod 4, a bearing seat 5 and a steel wire rope 6, and the bearing seat 5 is installed on the support frame 1 Above, the rope-winding rod 4 is installed on the bearing housing 5, the drive motor 2 is installed on the support frame 1, the drive motor 2 and the rope-winding rod 4 are connected by a coupling 3, and one end of the wire rope 6 is connected to the rope One end of the rotating rod 4 is connected, and the other end of the wire rope 6 is connected with the suspension release mechanism 8 . With such arrangement, the retraction and release of the rope can be precisely controlled, and the movement of the predetermined trajectory of the rocket body can be completed through the coupling action of multiple groups of rope-rai...
specific Embodiment approach 3
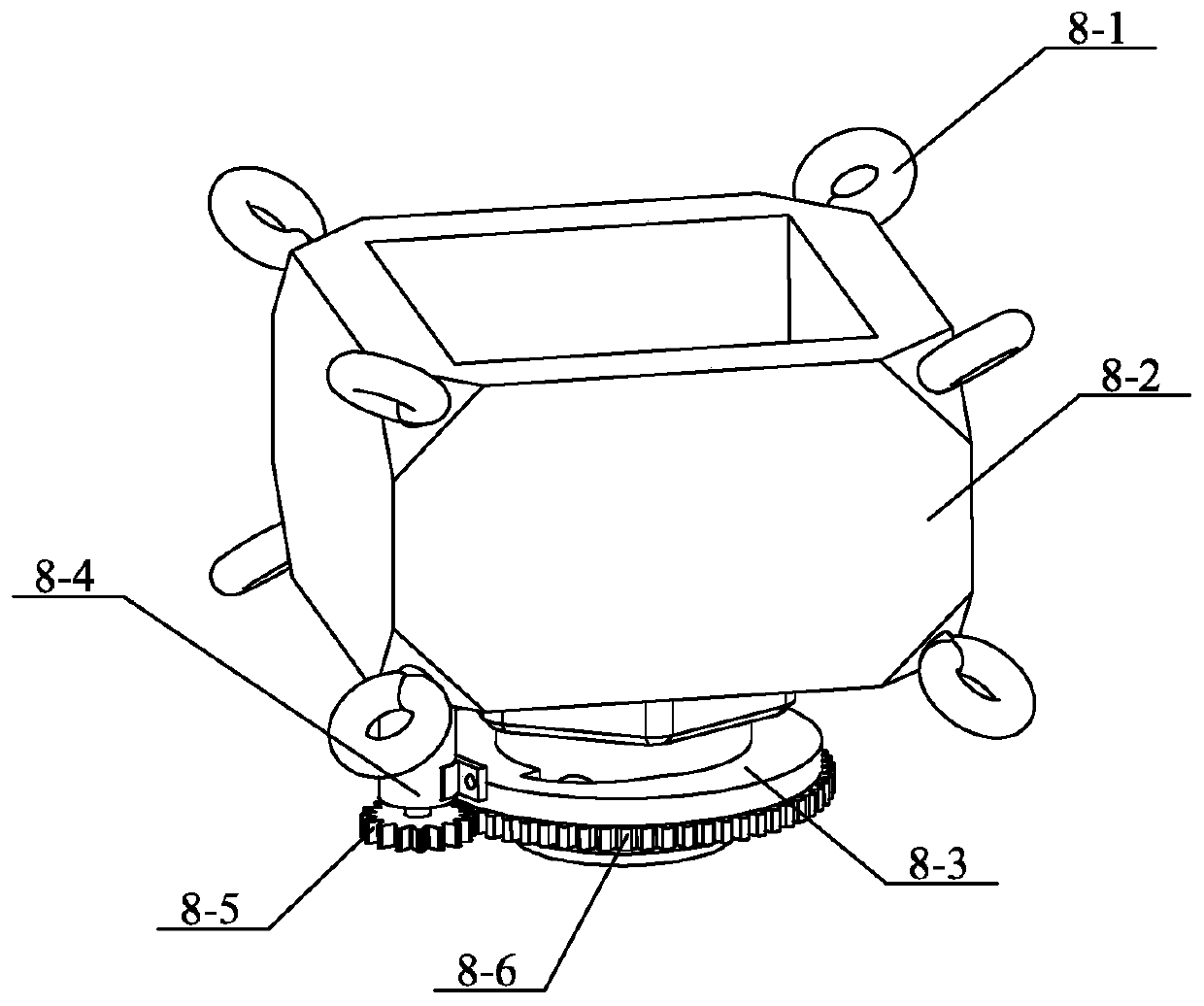
[0021] Specific implementation mode three: combination image 3 and Figure 4 Describe this embodiment, the suspension release mechanism 8 of this embodiment includes a control box 8-2, an unlocking flange 8-3, an unlocking assembly and a plurality of lifting lugs 8-1, and a plurality of lifting lugs 8-1 are installed on the control box On the outer wall of 8-2, the unlocking flange 8-3 is installed on the lower end surface of the control box 8-2, and the unlocking assembly is installed on the lower end of the unlocking flange 8-3. With this setting, the release of the rocket landing support mechanism is realized, and the simulation of different working conditions is completed. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com