


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Speed control multi-target optimized car following algorithm of automatic driving vehicle
A technology of multi-objective optimization and vehicle speed, which is applied in the field of car-following algorithms for multi-objective optimization of automatic driving vehicle speed control, which can solve the problems that limit the flexibility and accuracy of the model, it is difficult to promote driving scenarios and drivers, and it cannot reflect the driving style of the vehicle. and driving scenarios to achieve the effect of optimizing driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
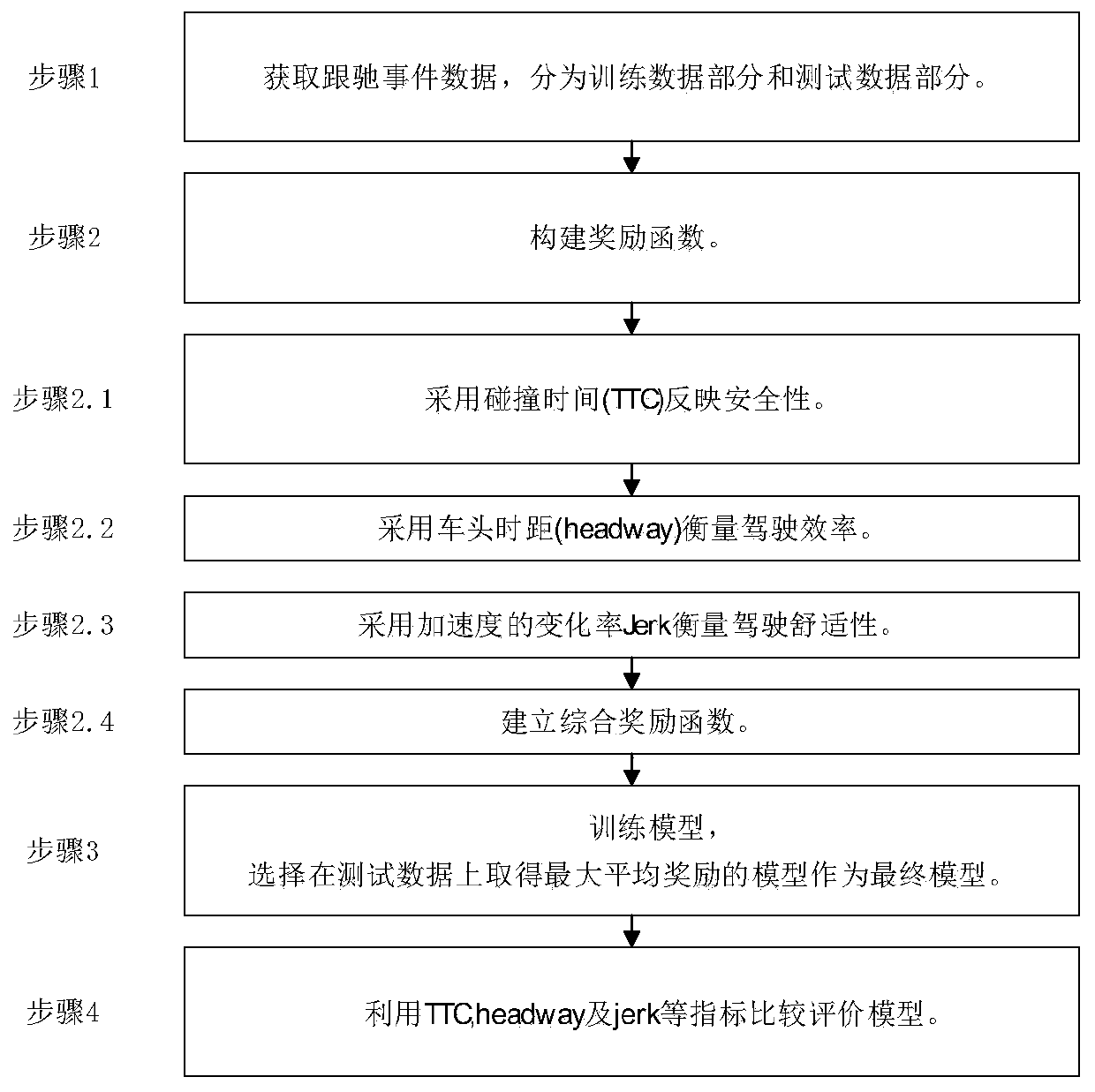
[0032] By comparing the car-following behavior simulated by empirical NGSIM data and DDPG model, it is tested that the model can follow the vehicle in front safely, efficiently and comfortably.
[0033] retrieve data. Using the data in the NGSIM project, car-following events were extracted based on criteria such as the preceding vehicle and the following vehicle staying in the same lane and the length of the vehicle following event > 15 seconds.
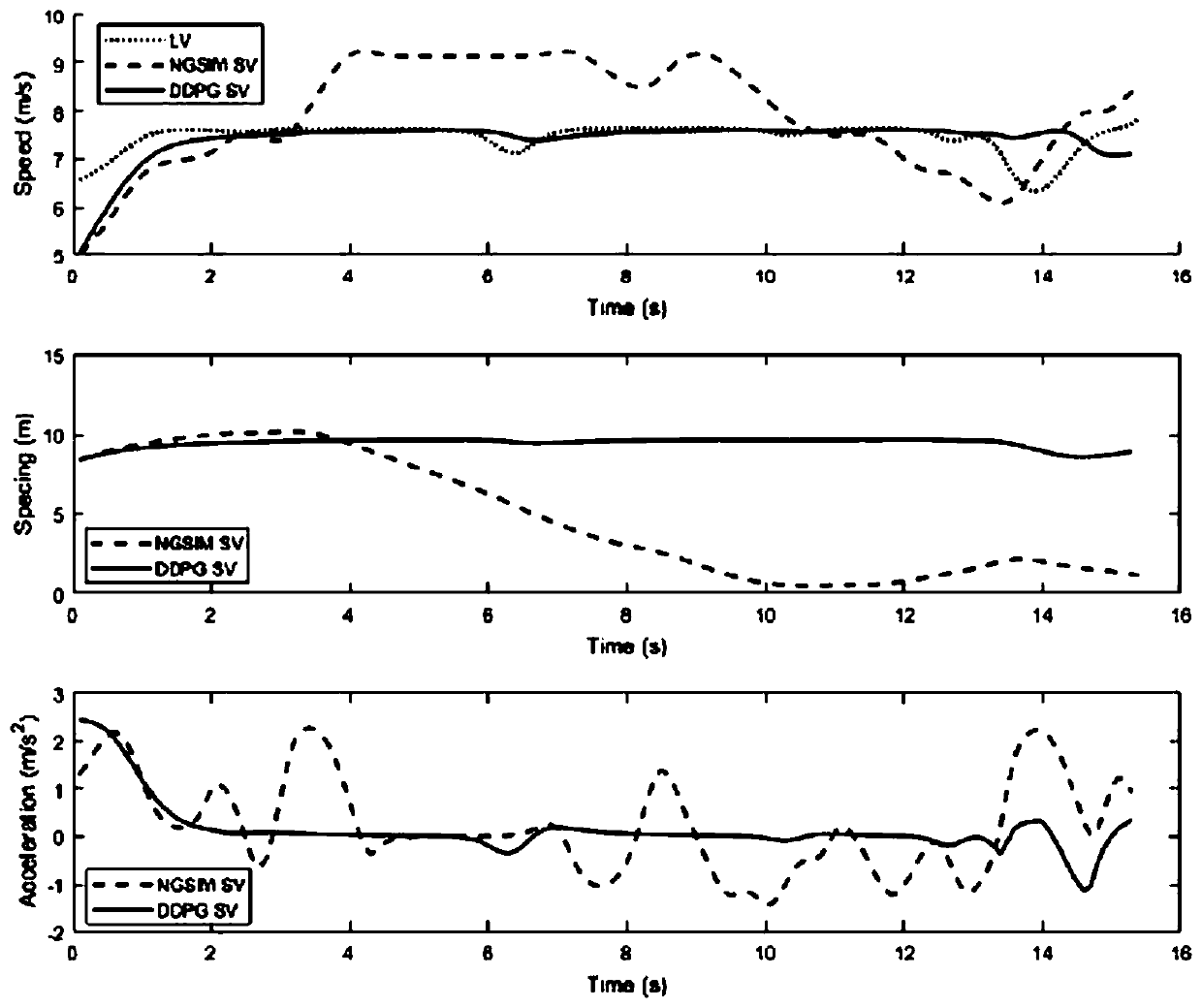
[0034] In terms of driving safety, a car-following event is randomly selected from the NGSIM dataset. figure 2 Observed velocities, separations, and accelerations are shown, along with corresponding index values generated by the DDPG model. The drivers in the NGSIM data drive with a very small inter-vehicle gap after 10 seconds, while the DDPG model always maintains a following gap of about 10 meters.
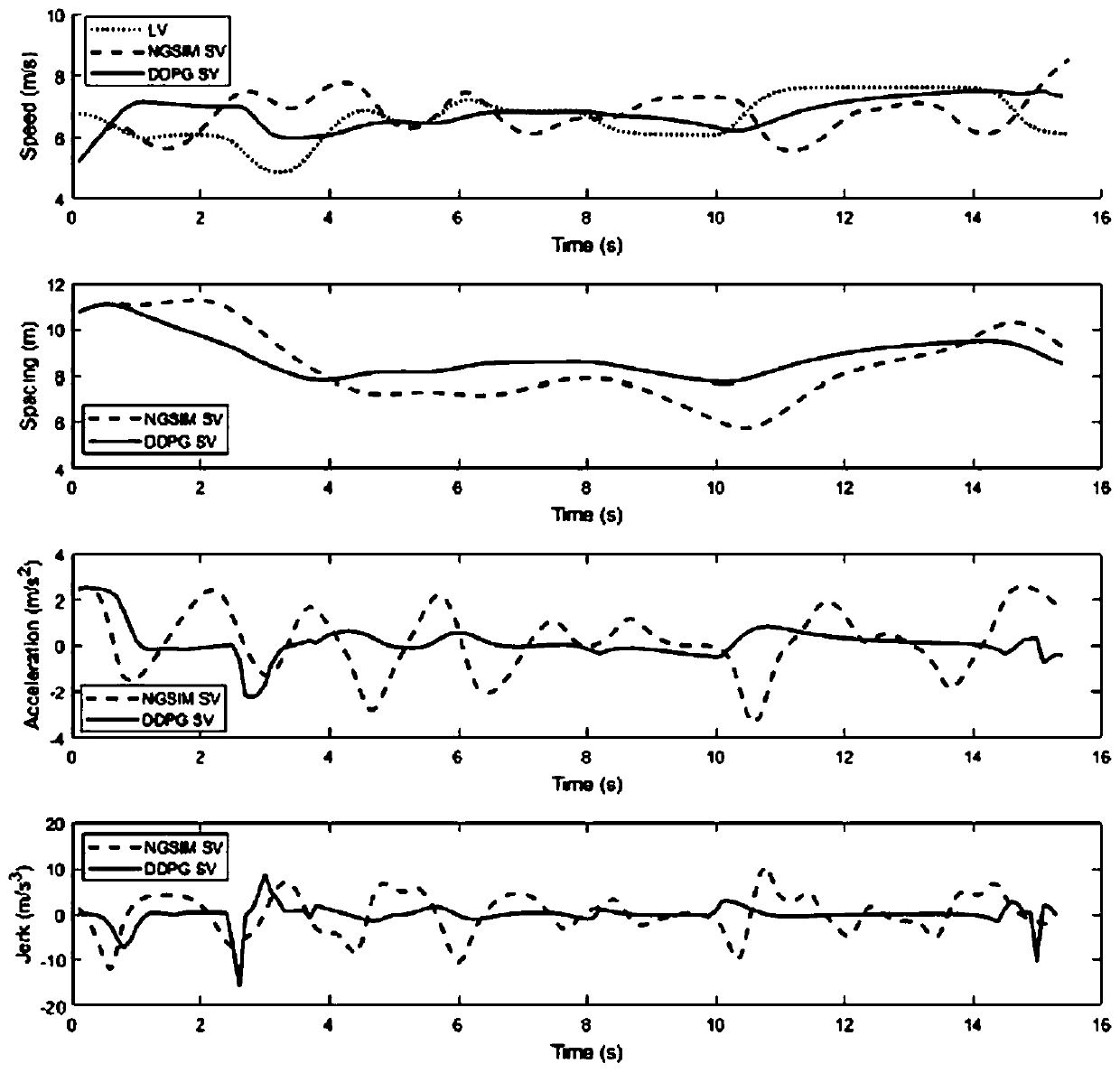
[0035] In terms of driving comfort, a car-following event is randomly selected in the NGSIM dataset. image 3 Observed velocit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com