An aerial refueling docking control method based on preview strategy
An aerial refueling and preview technology, applied in transportation and packaging, aircraft parts, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to facilitate those skilled in the art to understand and implement the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
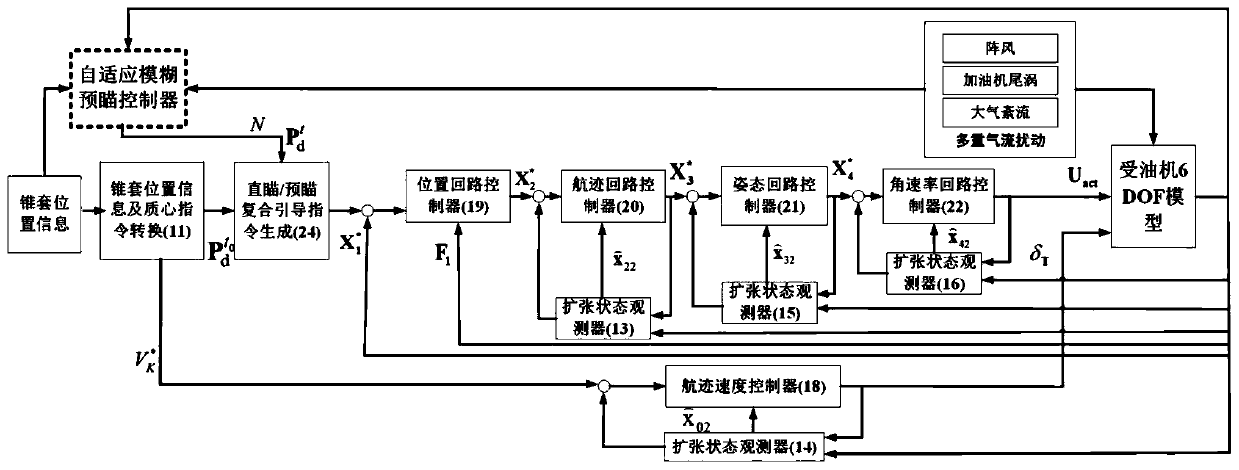
[0055] The air refueling docking control method based on the preview strategy of the present invention transforms the six-degree-of-freedom motion model of the receiver machine considering the airflow disturbance into an affine nonlinear form that facilitates the design of the nonlinear control method, and then adopts the active anti-interference control method design The trajectory tracking controller of the oil receiver improves its active anti-disturbance ability, and reduces the response lag problem caused by the slow dynamics of the oil receiver through the direct aiming / variable length rolling time-domain preview composite guidance method.
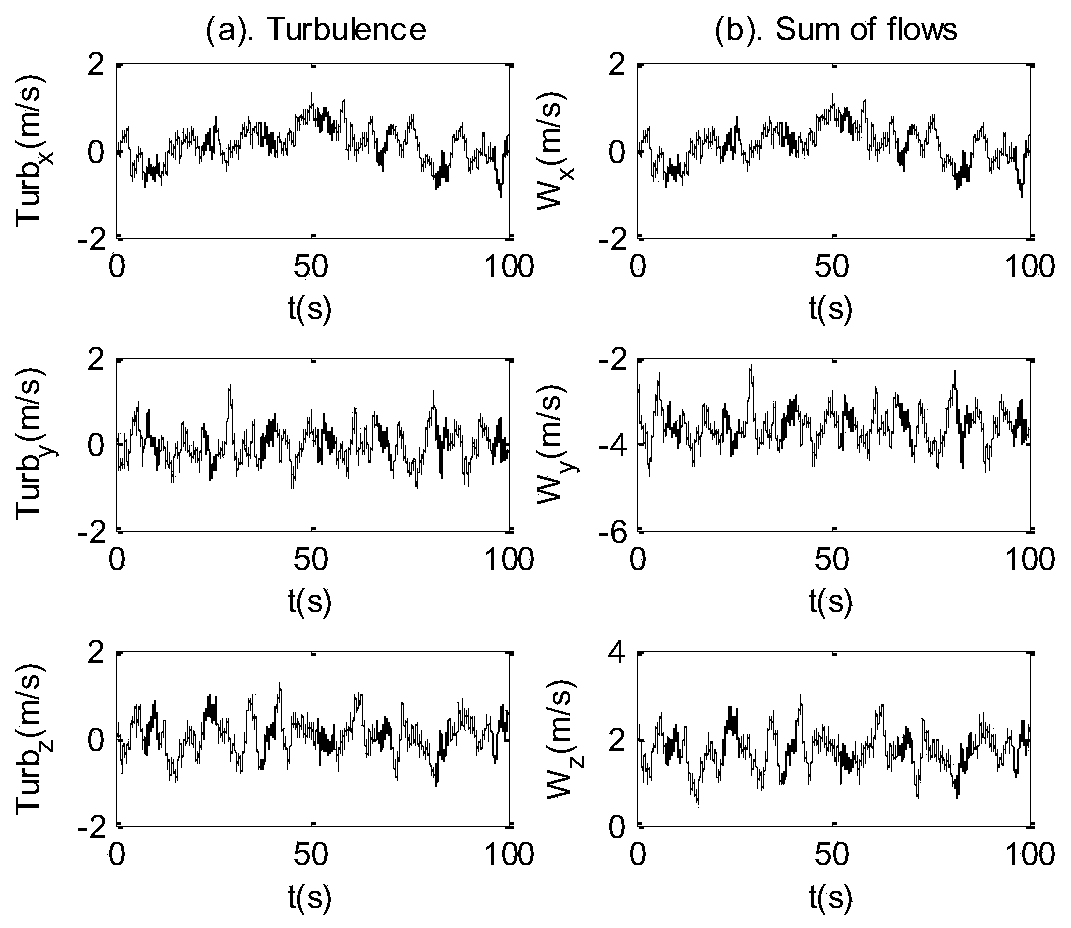
[0056] In the embodiment of the present invention, the UAV is set to fly at a ground speed of 200m / s,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com