Unmanned aerial vehicle three-dimensional track multi-target particle swarm global planning method
A multi-objective particle swarm and global planning technology, which is applied in the field of UAV 3D trajectory multi-objective particle swarm global planning, can solve the problems of enlarged search space and difficulty in 3D UAV trajectory planning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0066] A kind of unmanned aerial vehicle three-dimensional track multi-target particle swarm global planning method described in the present invention comprises the following steps:
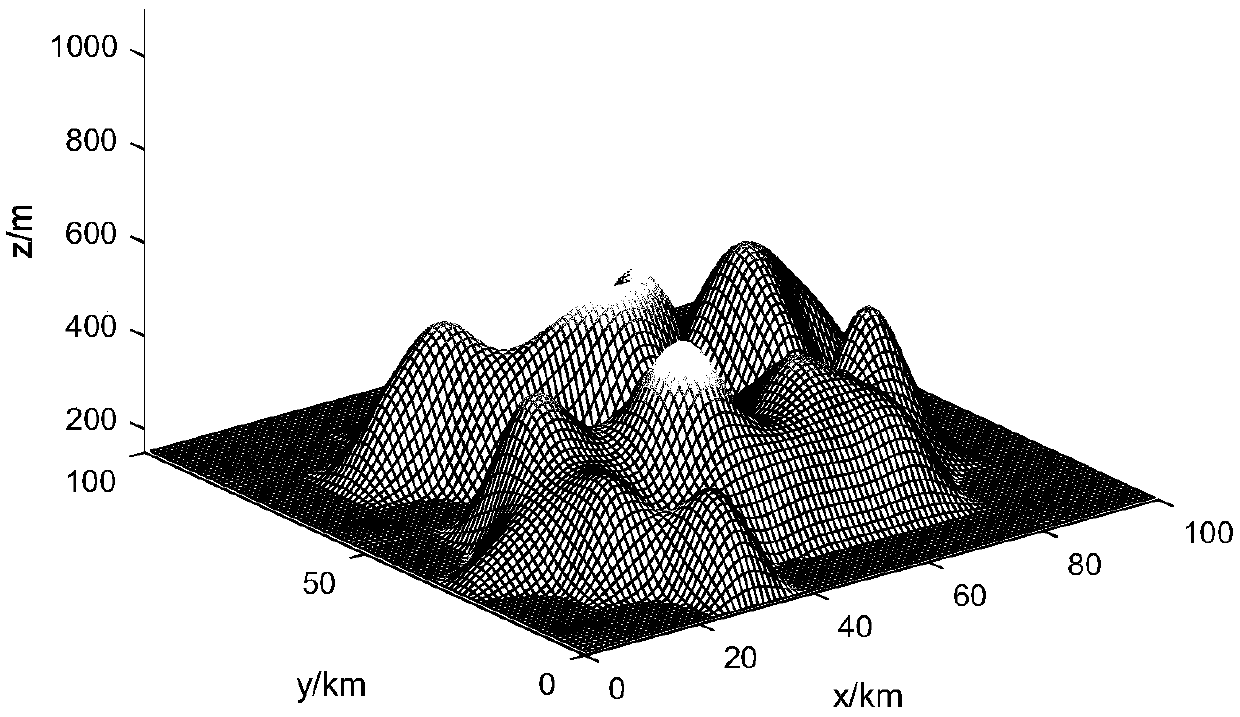
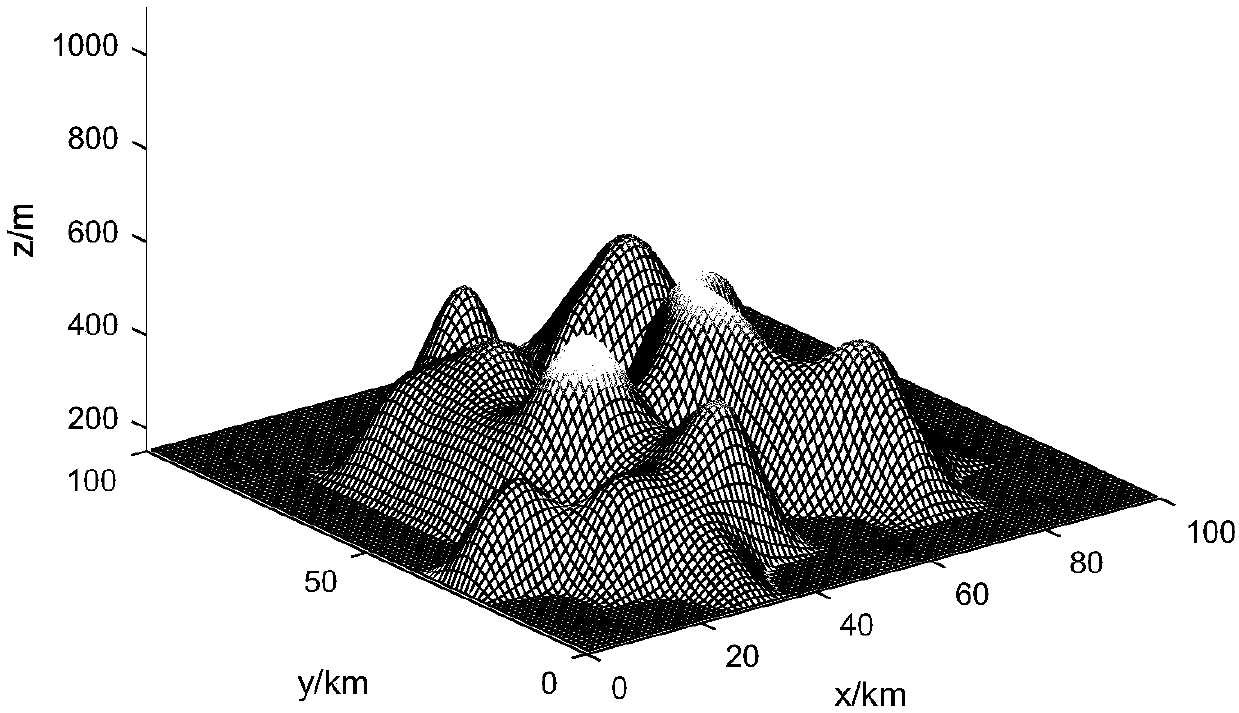
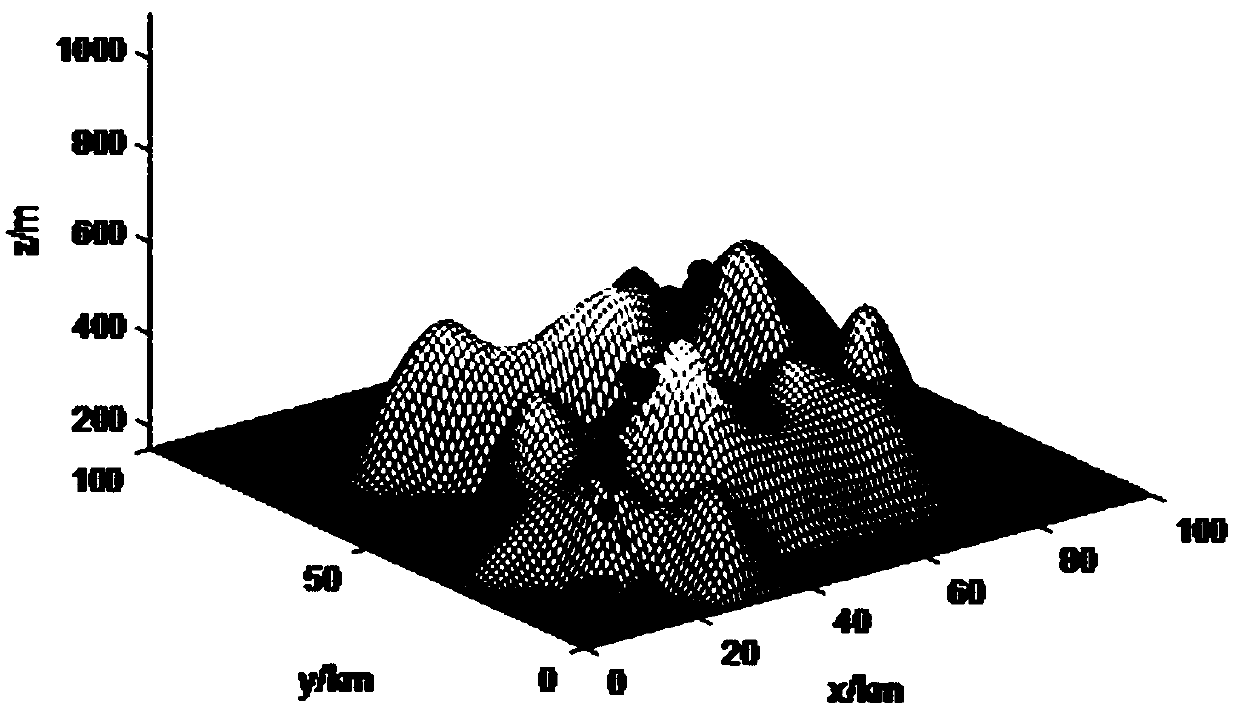
[0067] (1) Establish an environmental model: establish an environmental model according to the flight environment, and use digital map technology when processing the flight environment of the drone. The digital map technology discretely separates the continuous height of the terrain and stores it in the grid in digital form Among them, the distance between the grids is divided according to the needs of practical problems; the natural terrain information within the range of the drone's flight area, the center position of the threat information processed by the equivalent terrain, and The threat range of the threat.
[0068](2) Establish a traject...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com