A 3D point cloud registration method based on weighted principal component analysis and m estimation
A weighted principal component and 3D point cloud technology, applied in the field of 3D reconstruction, can solve the problems of ignoring the irregularities of 3D objects and failing to take into account the local structural characteristics of point clouds
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
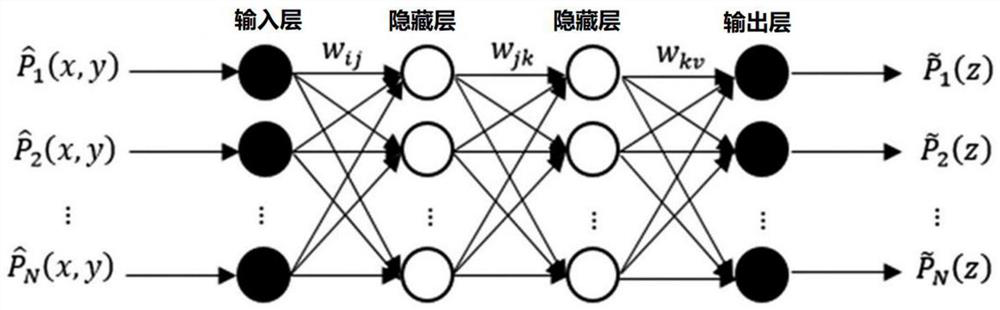
[0061] The invention provides a three-dimensional point cloud registration method based on weighted principal component analysis and M estimation,
[0062] First, the weighted PCA algorithm is used for rough registration, and the K nearest neighbor algorithm is used to calculate the K nearest neighbor points of each data point, and the adjacent points are sorted according to the distance between the neighbor points and the data point. Neighbors with small distances have a greater influence on the data points, while neighbors with greater distances have less influence on the data points. Therefore, different weights are given to adjacent points according to the distance between adjacent points and data points, so as to preserve the local characteristics of 3D point cloud data;
[0063] Secondly, due to the large amount of 3D point cloud data, it will take a lot of time to fine-register the data directly, so the simplification method is used to simplify the number of point cloud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com