


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A flexible multi-body robot modeling and solving method based on multi-dimensional reconstruction and correction
A flexible multi-body and robot technology, applied in CAD numerical modeling, instruments, manipulators, etc., can solve the problems of breach of contract failure and low solution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
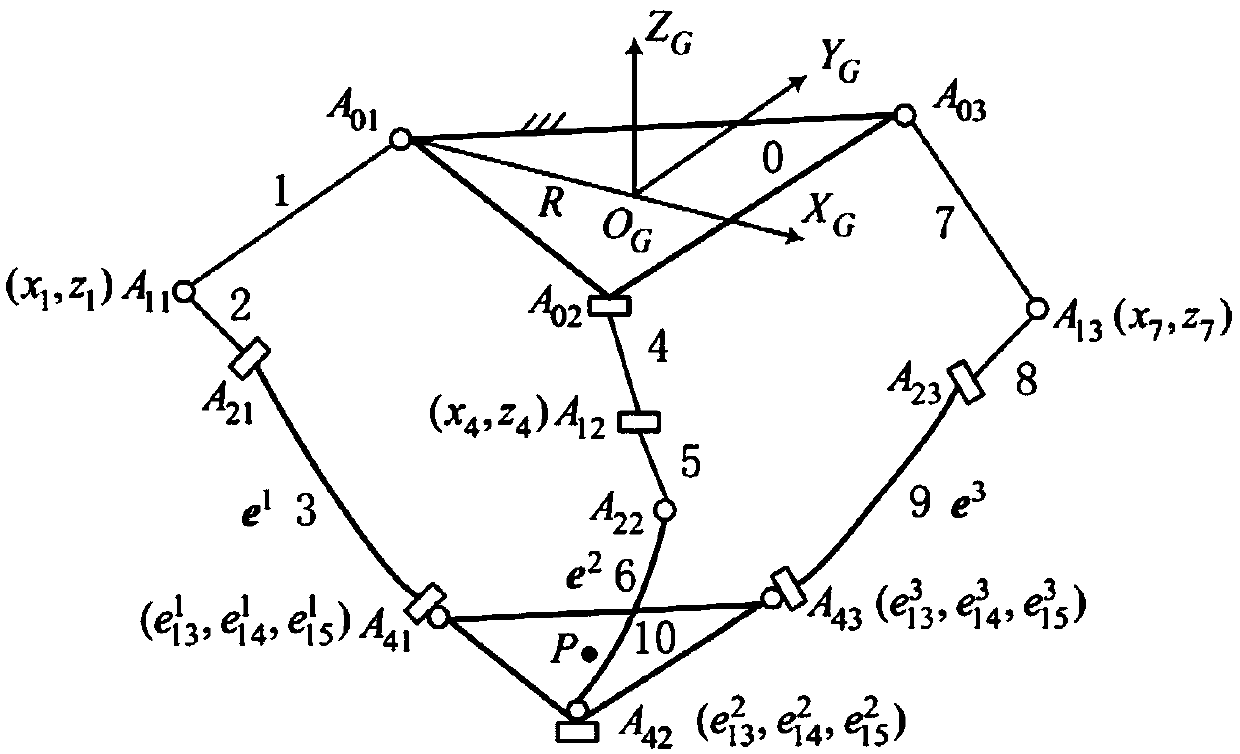
[0105] Such as figure 1 Shown is a three-degree-of-freedom 3-RRRU flexible multi-body robot, which consists of a static platform, a dynamic platform, and three branch chains with symmetrical structures; among them, the three branch chains are set in parallel, and the two ends of each branch chain are respectively Connect with static platform and dynamic platform. Since its structure includes flexible components, it is necessary to use the multi-dimensional reconstruction and correction based flexible multi-body robot modeling and solving method disclosed in the present invention to describe the system characteristics of the robot.
[0106] To this end, the specific steps of the modeling and solving method are as follows:
[0107] S1. Construct the mathematical model of each component of the flexible multi-body robot and set parameters:
[0108] The 3-RRRU flexible multi-body robot includes 1 static platform, 1 dynamic platform, 6 rigid rods and 3 flexible rods, among which, ...
Embodiment 2
[0164] A modeling and solving method for flexible multi-body robots based on multi-dimensional reconstruction correction, which is also aimed at such as figure 1 The characteristics of the three-DOF 3-RRRU flexible multibody robot shown are described.
[0165] The difference from Embodiment 1 is that in step S4 of this embodiment, according to the known state parameters of the flexible multi-body robot at time t, the inverse dynamics solution method is adopted, and the multi-dimensional reconstruction correction method is used to correct the complete constraints The mechanical equations of the 3-RRRU flexible multi-body robot are solved iteratively to obtain the state parameters of the flexible multi-body robot at time t.
[0166] Such as Figure 15 As shown, the specific steps of the inverse dynamics solution method are:
[0167] S401. According to the known state parameters of the end effector at time t, set the iteration initial values of the Lagrangian multiplier vecto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com