Passive anti-collision damping multi-rotor drone
A multi-rotor unmanned aerial vehicle and anti-collision technology, which is applied in the field of unmanned aerial vehicles, can solve the problems of inability to adjust, low position probability, affecting flight, etc., and achieves the effects of simple setting, flight safety, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0054] In the accompanying drawings, the meanings of each number are as follows:
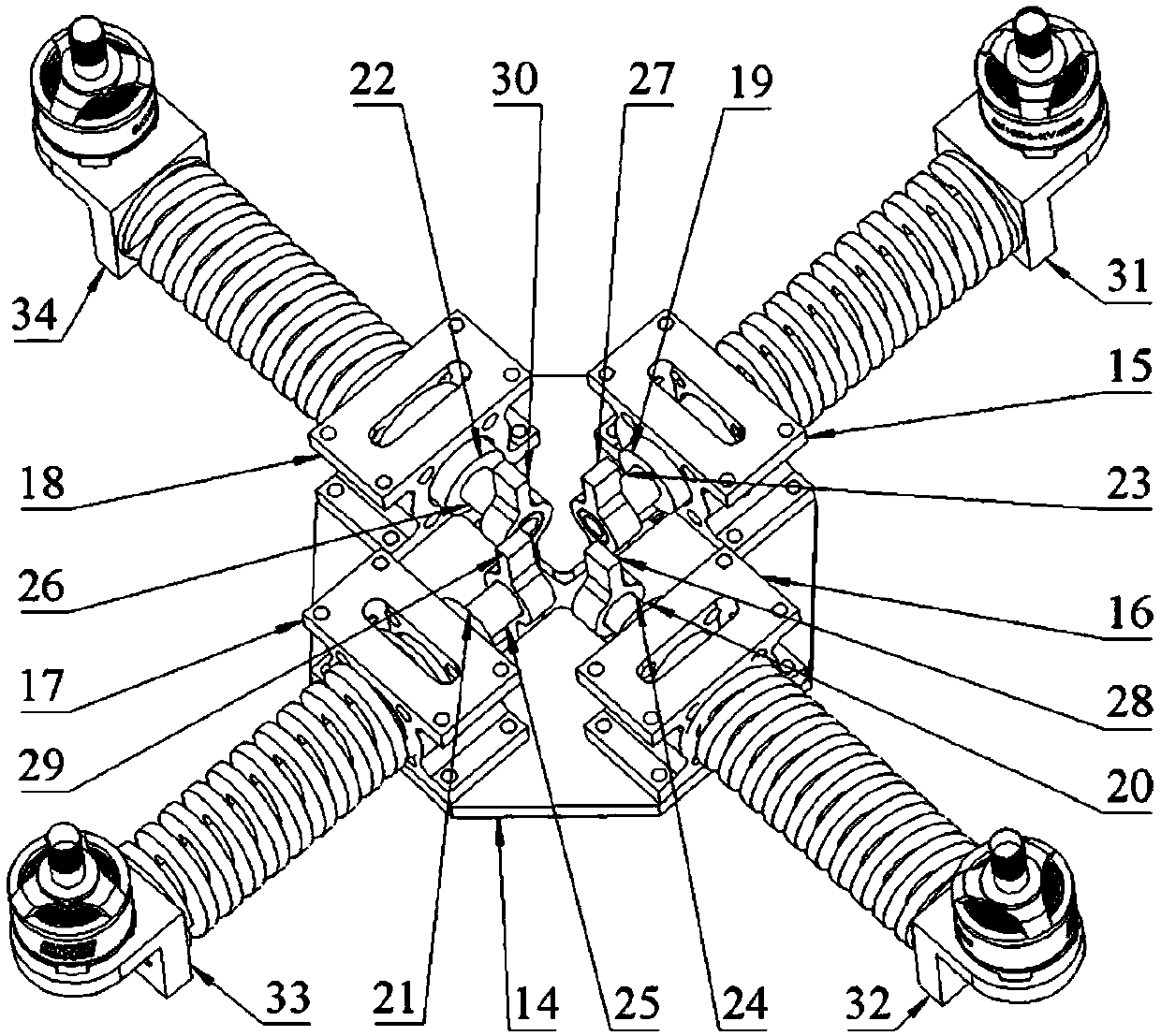
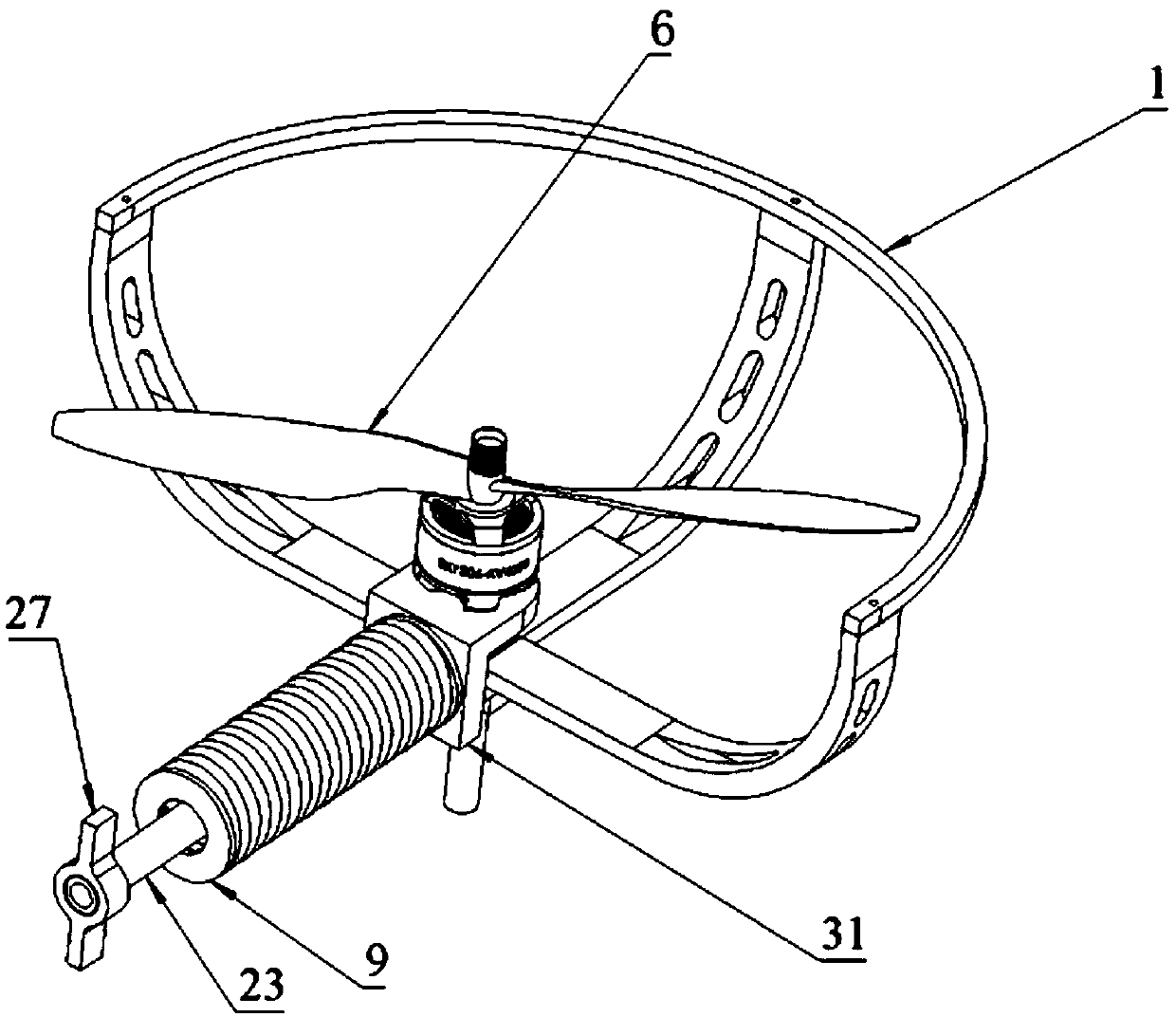
[0055] 1, 2, 3, 4 protective cover; 5, 6, 7, 8 motor; 9, 10, 11, 12 spring; 13 top plate; 14 bottom plate; 15, 16, 17, 18 bearing seat; 19, 20, 21, 22 linear bearing; 23, 24, 25, 26 carbon rod; 27, 28, 29, 30 support seat; 31, 32, 33, 34 motor seat.
[0056] figure 1 , figure 2 Shown, a kind of passive anti-collision shock-absorbing multi-rotor unmanned aerial vehicle, four machine arms of the same structure are evenly arranged along the same circumference on the bottom plate 14, and each machine arm structure is: the bearing seat 15 is fixed on the bottom plate 14 by bolts Above, the linear bearing 19 is installed in the bearing seat 15, the inner end of the carbon rod 23 passes through the linear bearing 19 and is slidably arranged on the linear bearing 19, the outer end of the carbon rod 23 is fixedly connected with a motor seat 31, and the motor 5 is installed on the motor seat 31, the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com