Outer-limb robot module unit and modular reconfigurable outer-limb robot
A modular unit and robot technology, applied in the field of robotics, can solve the problems of complex structure of modular robots, limited practical application research, high production and maintenance costs, and achieve the effects of fast connection, improved flexibility, complexity and cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
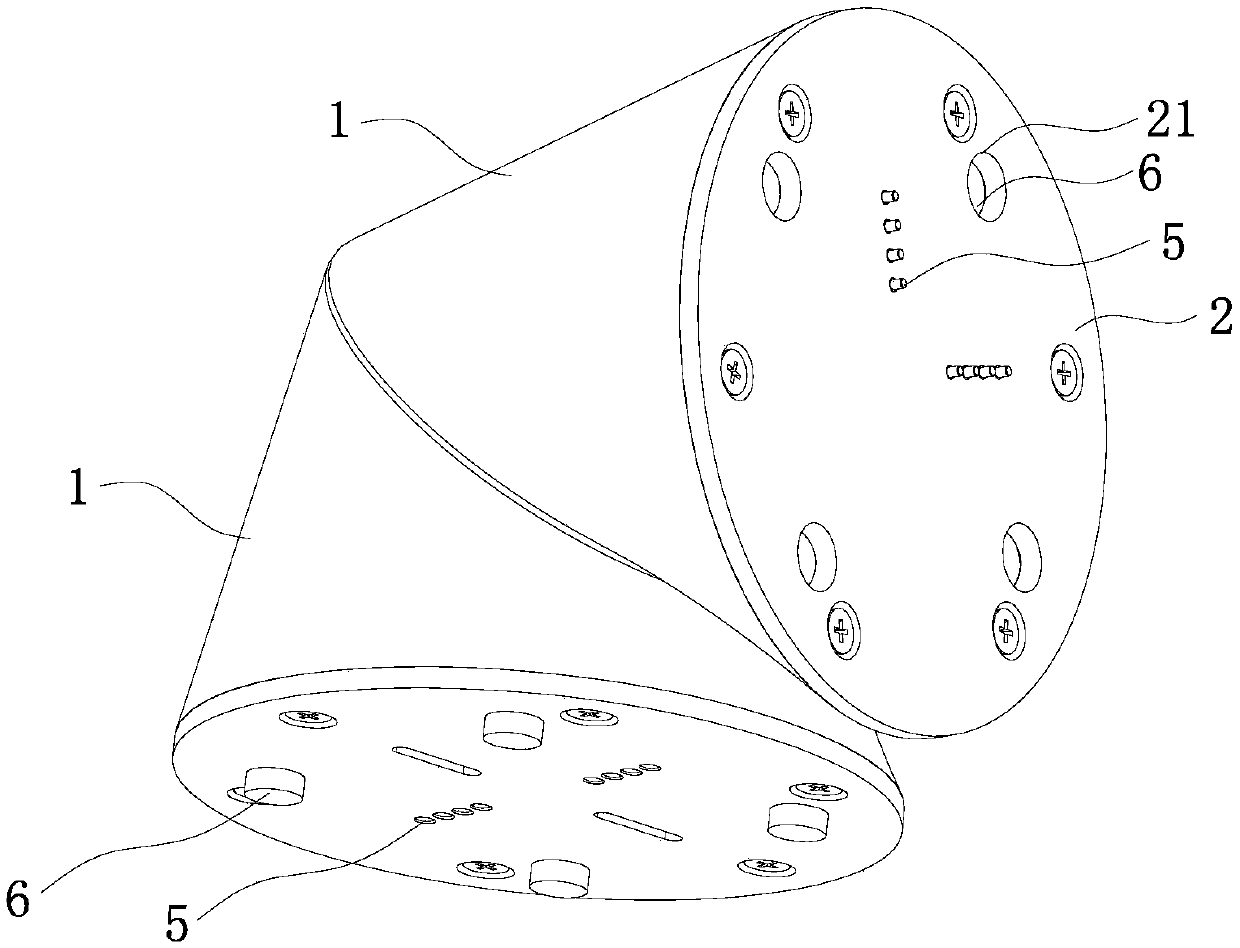
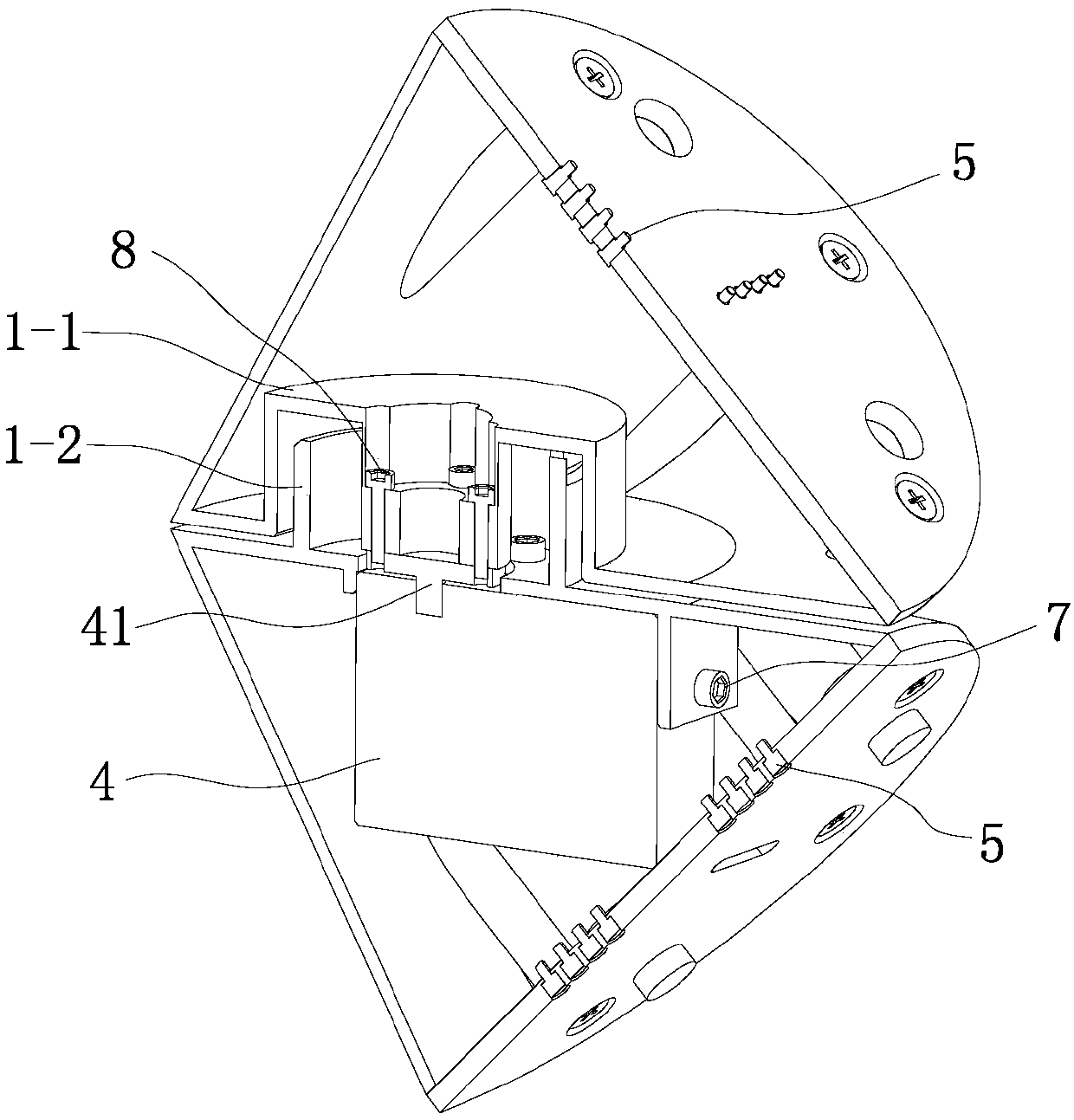
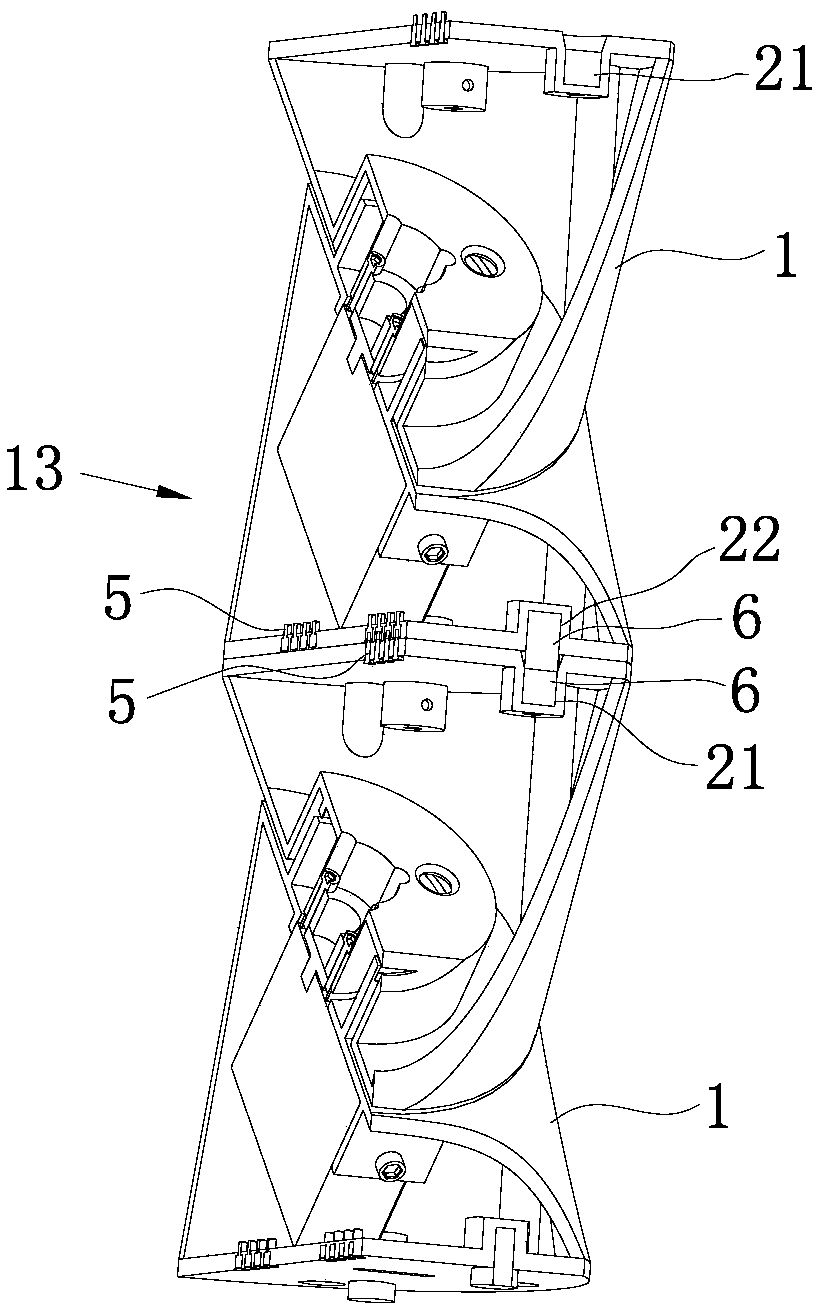
[0017] Such as Figure 1 to Figure 2 Shown, a kind of extremity robot module unit, it comprises steering gear 4 and two docking modules, and each said docking module comprises casing 1, bottom plate 2 and permanent magnet 3; The housing, the bottom plate 2 is covered at the opening of the housing 1, the two housings 1 are docked, the steering gear 4 is arranged in the inner cavity of any housing 1 and connected to the housing 1, and the output end of the steering gear 4 is installed The steering wheel 41 is connected to the other housing 1, and the other housing 1 can rotate relative to one of the housings 1 under the drive of the steering gear 4, and one of the bottom plates 2 is provided with a plurality of externally extending connection communication Pogo pins 5, the other bottom plate 2 are provided with a plurality of pogo pins 5 extend...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com