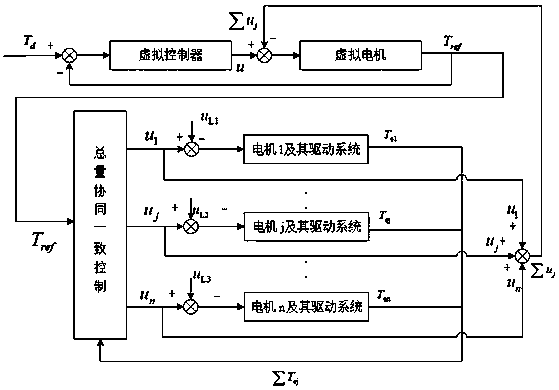
A multi-motor total amount collaborative consistency fault-tolerant control method based on a virtual total axis
A virtual total axle, fault-tolerant control technology, applied in the direction of motor control, multiple motor speed regulation, control system, etc. Fault-tolerant control, the effect of ensuring total consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in combination with specific embodiments.
[0024] According to the existing research "Consensus-based total-amount cooperative tracking control for multi-motor locomotive traction system", the multi-motor mathematical model is specifically:
[0025]
[0026] In the formula, R j , L j Represent the resistance and inductance of the armature circuit, i j is the motor current, ω j is the output angular velocity of the jth motor gearbox, u j is the voltage at the input port of the armature circuit, k ej is the back electromotive force constant, k tj is the transmission ratio of the gearbox. J 0j and J 1j are the moments of inertia of the motor and the gearbox respectively, b 0j and b 1j are the viscous friction coefficients of the motor and the gearbox, k mj is the motor torque constant, Τ Lj is the load torque, Τ ej output torque for the motor.
[0027] Since the multi-motor system is smooth and differe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com