Collaborative analysis reentry guidance method considering multiple no-fly zone constraint
A re-entry guidance and no-fly zone technology, applied in the fields of guidance and control, weapon technology, and aerospace technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
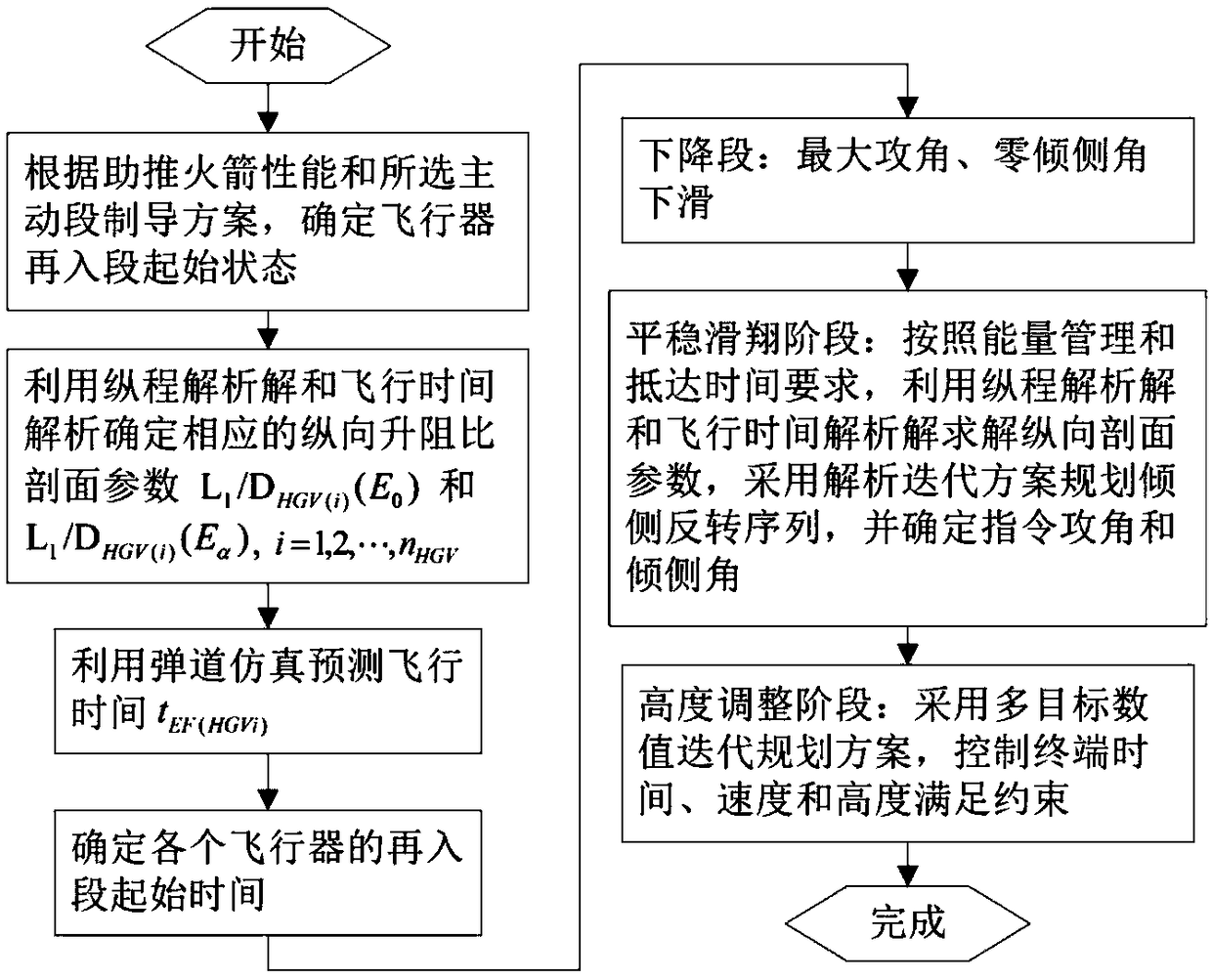
Method used
Image

Examples
Embodiment 1
[0366] In this embodiment, the time-of-flight analytical solution of the present invention is compared with traditional methods and numerical ballistic simulation results to verify the prediction accuracy of the time-of-flight analytical solution of the present invention.
[0367] The flight time formula under the condition of constant longitudinal lift-to-drag ratio in Document 2 is
[0368]
[0369] Set the initial longitude λ of the aircraft 0 =0deg, initial latitude φ 0 =50deg, initial energy E 0 =-3.8602×10 4 kJ / kg and terminal energy E f =-5.5×10 4 kJ / kg. Consider 5 different flight directions: ψ 0 =100deg, 180deg, -100deg, 20deg, -20deg. Set the vertical lift-to-drag ratio in Document 2 as The lateral lift-to-drag ratio is
[0370] The simulation results are shown in Table 1. It can be seen from the simulation results that due to the influence of the earth's rotation, the flight time of the aircraft in different directions is not the same, but the analyt...
Embodiment 2
[0374] This embodiment is an ideal non-interference situation, and solves the coordinated flight problem of guiding multiple hypersonic glide vehicles (V1, V2, V3) to launch from different locations but arrive at the same target at the same time in a multi-no-fly zone environment. 64 circular no-fly zones with a radius of 200km are arranged in the flight area. The initial conditions of the aircraft are shown in Table 1, and the position of the target point is the longitude λ T =130deg, latitude φ T =-20 deg. Using the multi-aircraft arrival time coordination scheme in step 7, t can be selected TAEM =2900s, and determine the re-entry starting time of each aircraft, which are 109.29s, 358.69s and 751.62s respectively.
[0375]
[0376] Table 2
[0377] In the reentry stage, the horizontal distance from the aircraft to the target is S TAEM = Terminate at 50km. At this point the desired terminal height is H TAEM =25km, the terminal speed is V TAEM =2000m / s, terminal head...
Embodiment 3
[0380] In this embodiment, Monte Carlo simulation is used to verify the robustness of the guidance method of the present invention under the condition that the aircraft model is deflected. Among them, the aerodynamic coefficient adopts the following linear pull-off model
[0381]
[0382]
[0383] Among them, δ CL and δ CD are the pull-off percentages of the lift coefficient and drag coefficient, respectively, which vary with the angle of attack α and the Mach number Ma. δ CL0 , is the associated zero-mean normally distributed random parameter. The wind and atmospheric density perturbation model is as follows
[0384]
[0385]
[0386] δ ρ =k ρ δ ρ(max) (130)
[0387] in, is the wind speed in the east-west direction, is the wind speed along the north-south direction, δ ρ is the percentage of atmospheric density pull. V wind(max) It is the maximum possible wind speed, which varies with height and can reach 170m / s at high altitude. δ ρ(max) It is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com