A multi-camera vision-inertial real-time positioning method and device for a robot
A multi-camera vision, real-time positioning technology, applied in the field of robot navigation, can solve the problems of indistinct visual features, blurred imaging, and high repeatability of feature textures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] Below, the technical solution of the present invention will be further described in conjunction with the accompanying drawings and specific embodiments:
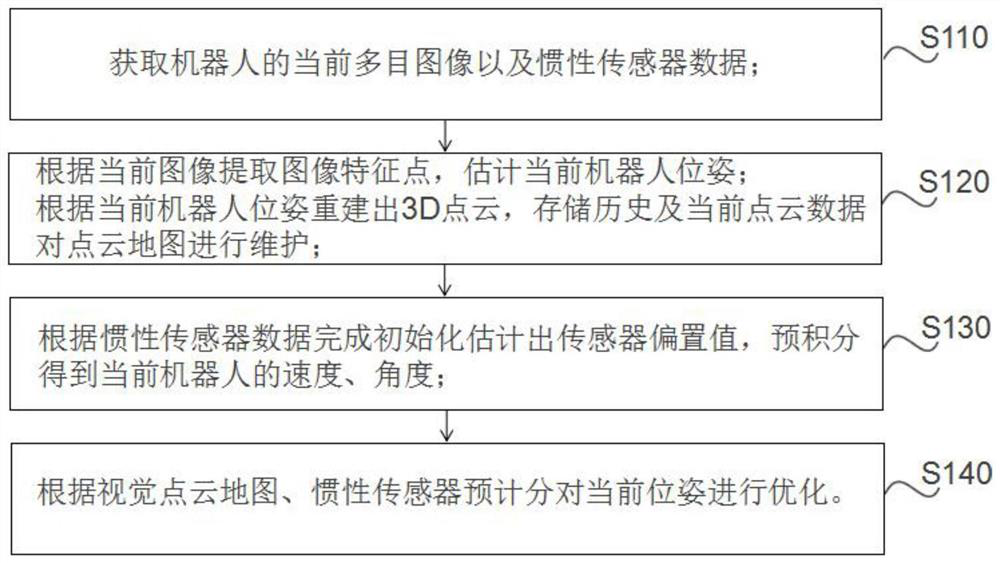
[0043] figure 1 It is a schematic flow chart of the multi-camera visual-inertial real-time positioning method for a robot of the present invention, and the present invention discloses a multi-camera visual-inertial real-time positioning method for a robot, comprising the following steps:
[0044] Obtain the current multi-eye image and inertial sensor data of the robot;
[0045] Extract image feature points according to the current image, estimate the current robot pose; reconstruct a 3D point cloud according to the current robot pose, store historical and current point cloud data to maintain the visual point cloud map;
[0046] Complete the initialization and estimate the sensor bias value according to the inertial sensor data, and pre-integrate to obtain the current speed and angle of the robot;
[0047] Optimize t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com