A foot device for assisting weight-bearing lower extremity exoskeleton
An exoskeleton and foot technology, applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of reducing user comfort, impacting the spine and brain, and impact, etc., so as to increase the contact area of the sole of the foot and reduce the size of the foot. Bottom pressure value, the effect of reducing human torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
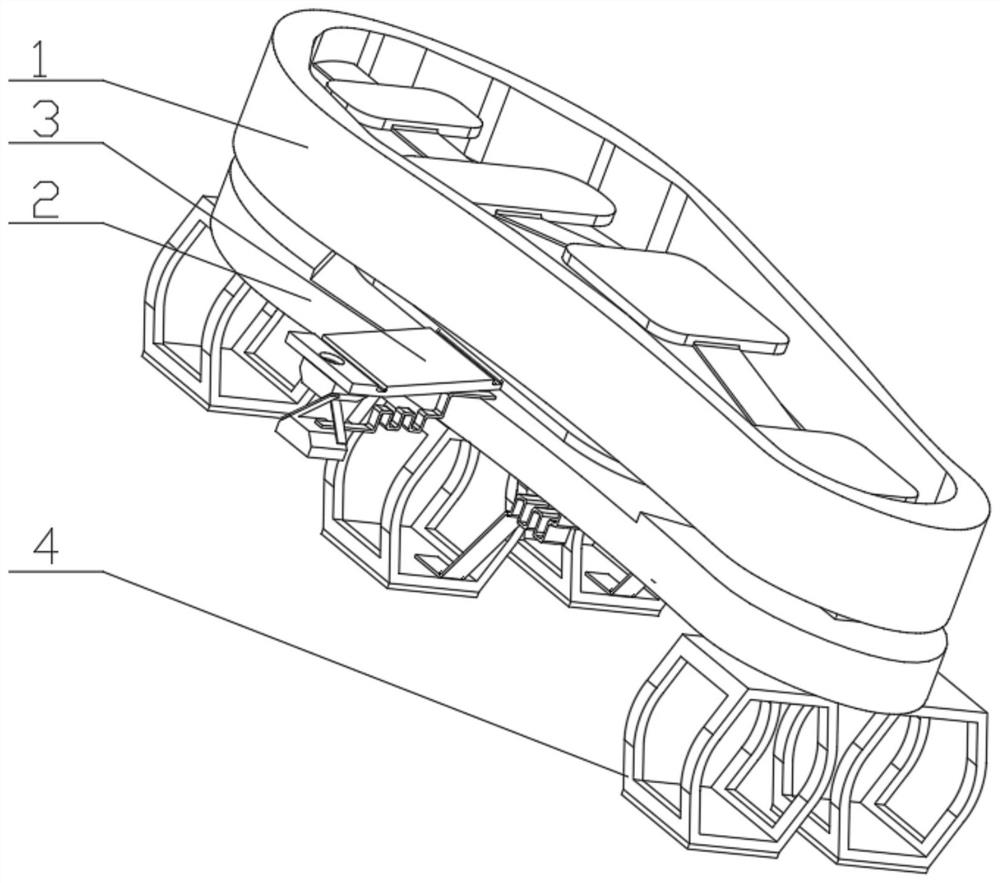
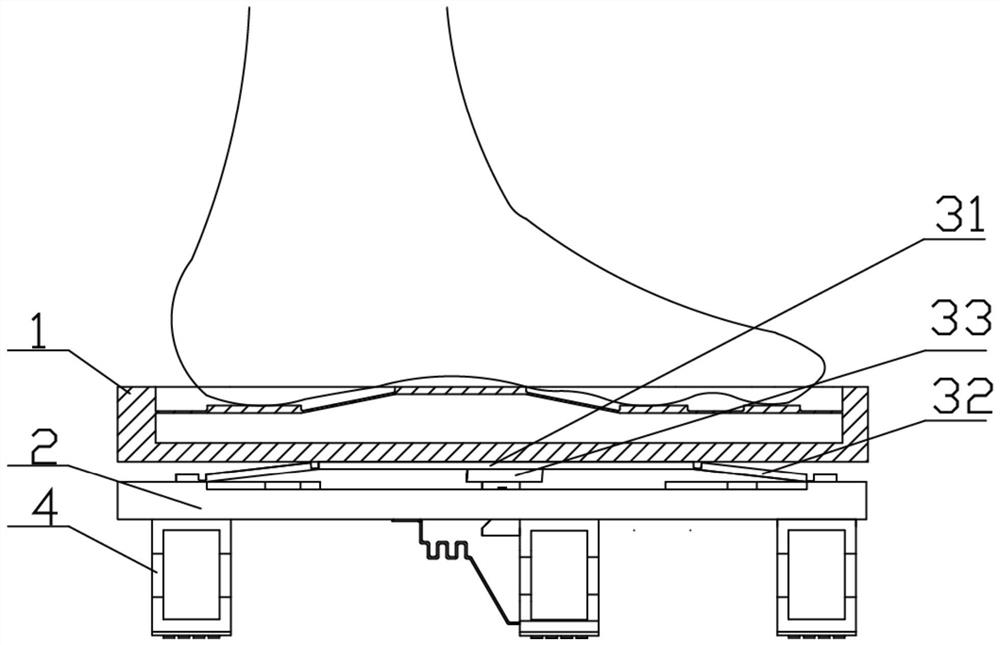
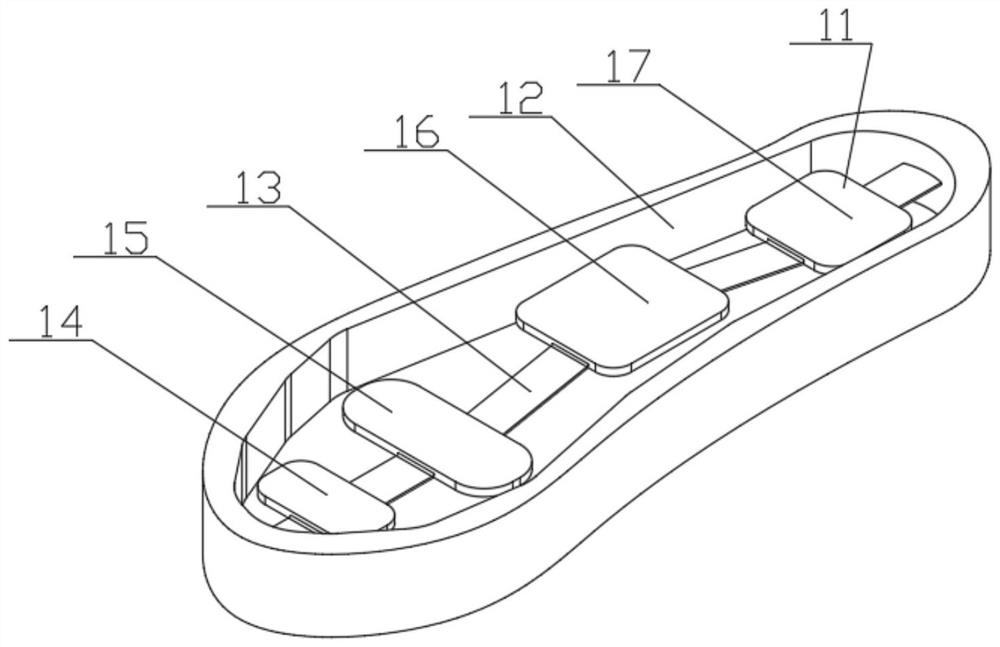
[0027] The invention provides a foot device (foot device for short, refer to Figure 1-8 ), characterized in that the foot device includes a contact plate 1, a support plate 2, a human body arch mechanism 3 and an elastic damping mechanism 4; the human body arch mechanism 3 is arranged between the contact plate 1 and the support plate 2, respectively The contact plate 1 is connected with the support plate 2; the contact plate 1 is used to completely contact with the human foot, fully release the degree of freedom of the sole of the foot during walking, and increase the walking comfort; the human foot arch mechanism 3 can imitate the human longitudinal arch and The transverse bow moderates impact and vibration, absorbs energy when stressed,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com