A dual-drive unmanned bicycle
A bicycle and dual-drive technology, applied in the field of mobile robots, can solve problems such as difficult system balance control, complex structure, and inconvenient steering, and achieve the effects of improving flexibility, adaptability, and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
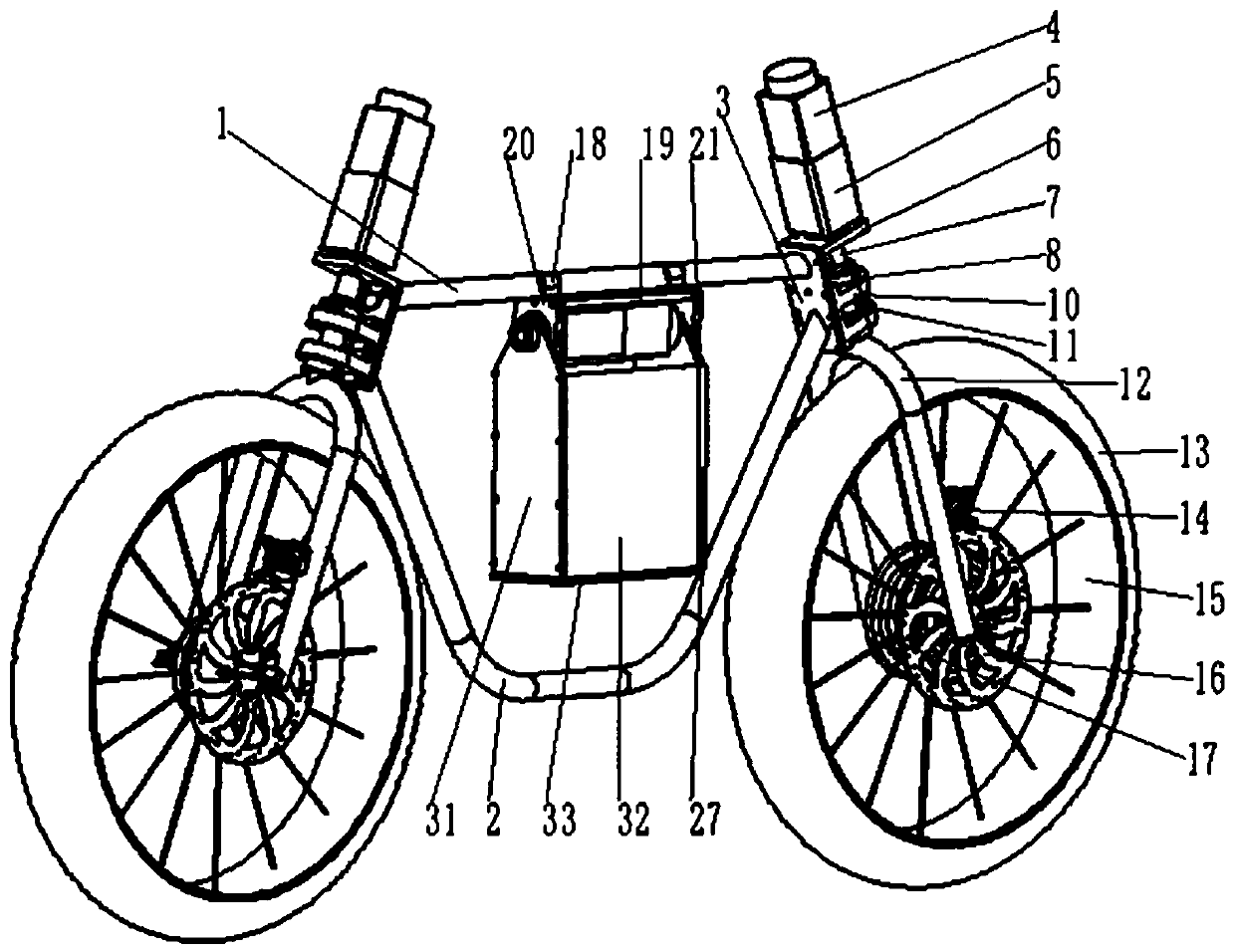
[0039] figure 1 The overall structure of the unmanned bicycle system is shown, which is mainly composed of four parts: frame structure, wheel structure, steering structure and counterweight structure. In this embodiment, in order to realize automatic control, a control unit connected with the upper computer is also provided. The mechanical structure of these four parts will be described in detail below.
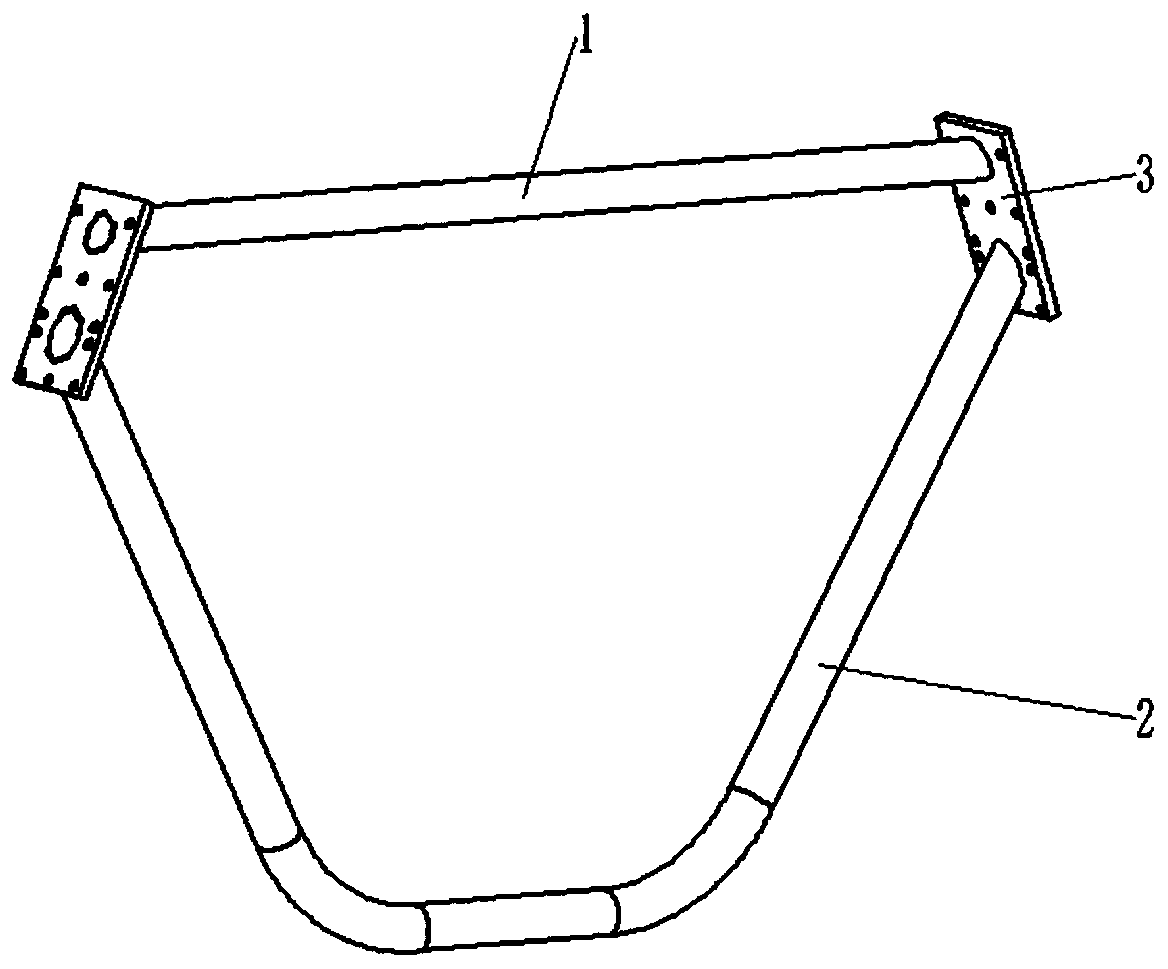
[0040] figure 2 It is the detailed structure of the frame structure part of the unmanned bicycle system. The straight steel pipe 1 and the curved steel pipe 2 are fixed on two rectangular connecting plates 3 forming a certain angle with the horizontal plane by welding to form a frame. On the rectangular connecting plate 3, there are also a corresponding number of through holes for installation.
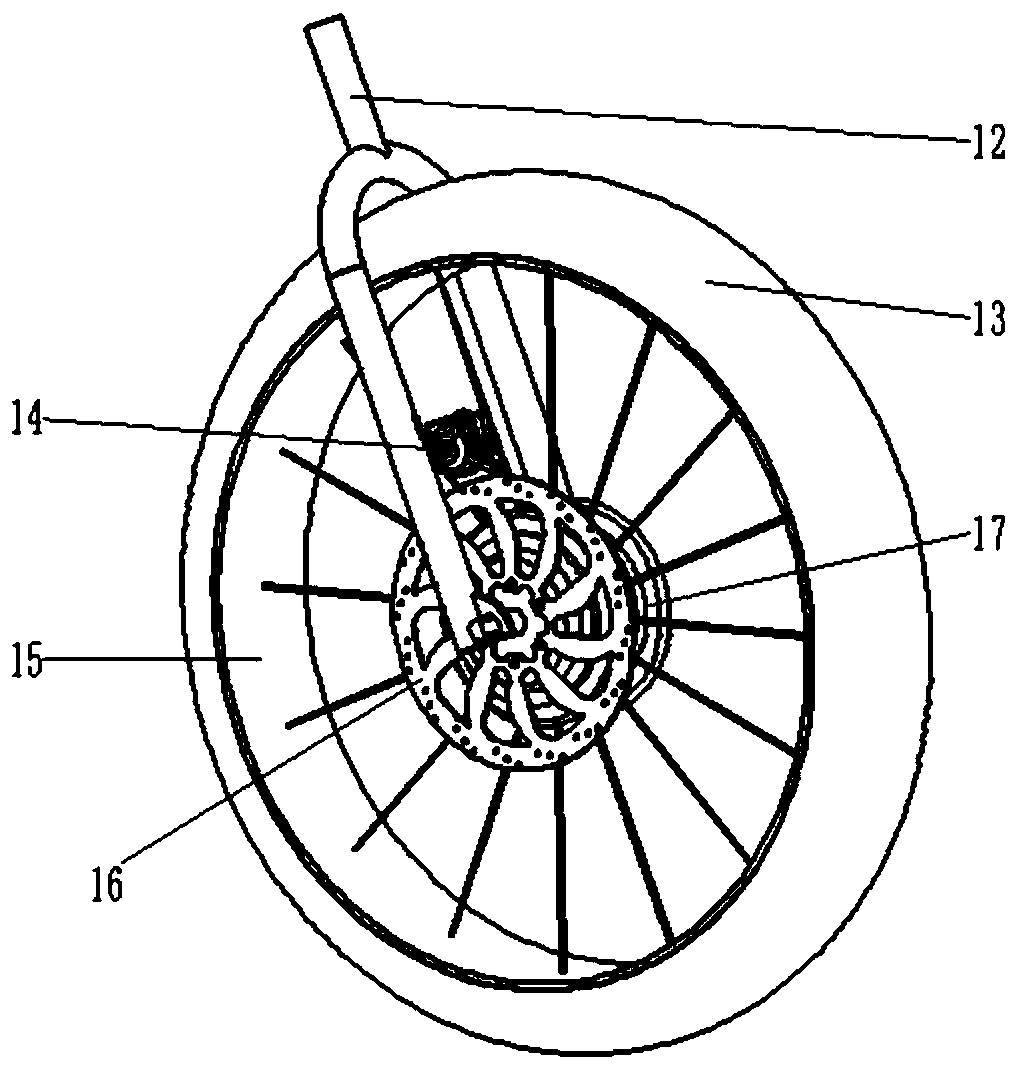
[0041] image 3 It is the detailed structure of the wheel structure part of the unmanned bicycle system. Tire 13, wheel hub 15, driving motor 17 jointly form wheel, is driven ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com