Recognition method of rov deformation small target based on convolution kernel screening ssd network
A technology of target recognition and recognition method, which is applied in the field of detection based on small deformation targets, can solve the problems of large calculation requirements, deep learning cannot run in real time, difficult to solve, power consumption increase, etc., to increase real-time performance and feasibility, The effect of improving real-time performance and reducing the occupied volume and calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
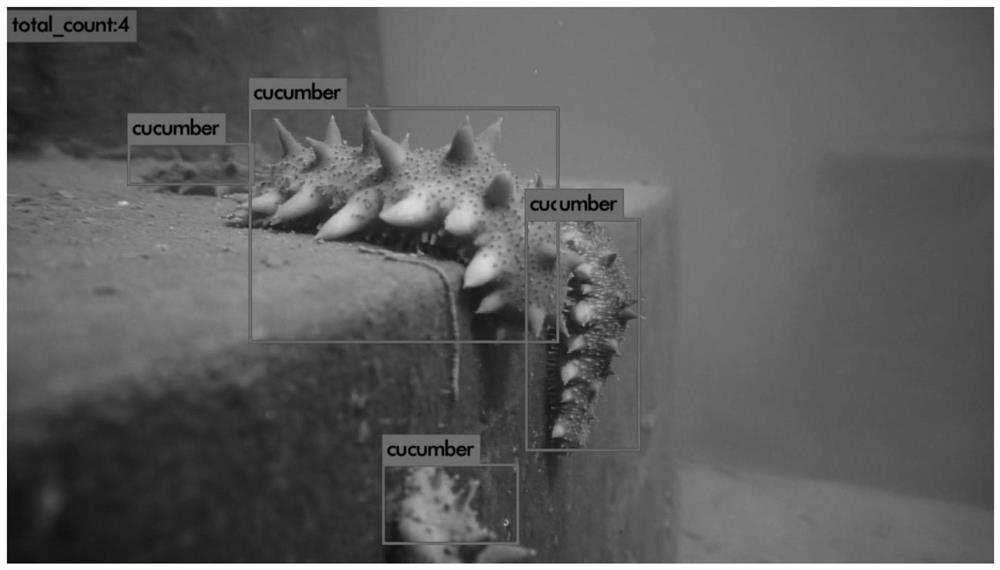
[0024] Embodiment 1: Sea cucumbers in the marine underwater environment are taken as detection objects.
[0025] The specific flow chart of this embodiment is as follows figure 2 shown.
[0026] The following steps should be described in detail in conjunction with the accompanying drawings and specific results, and should only be outlined steps in the summary of the invention.
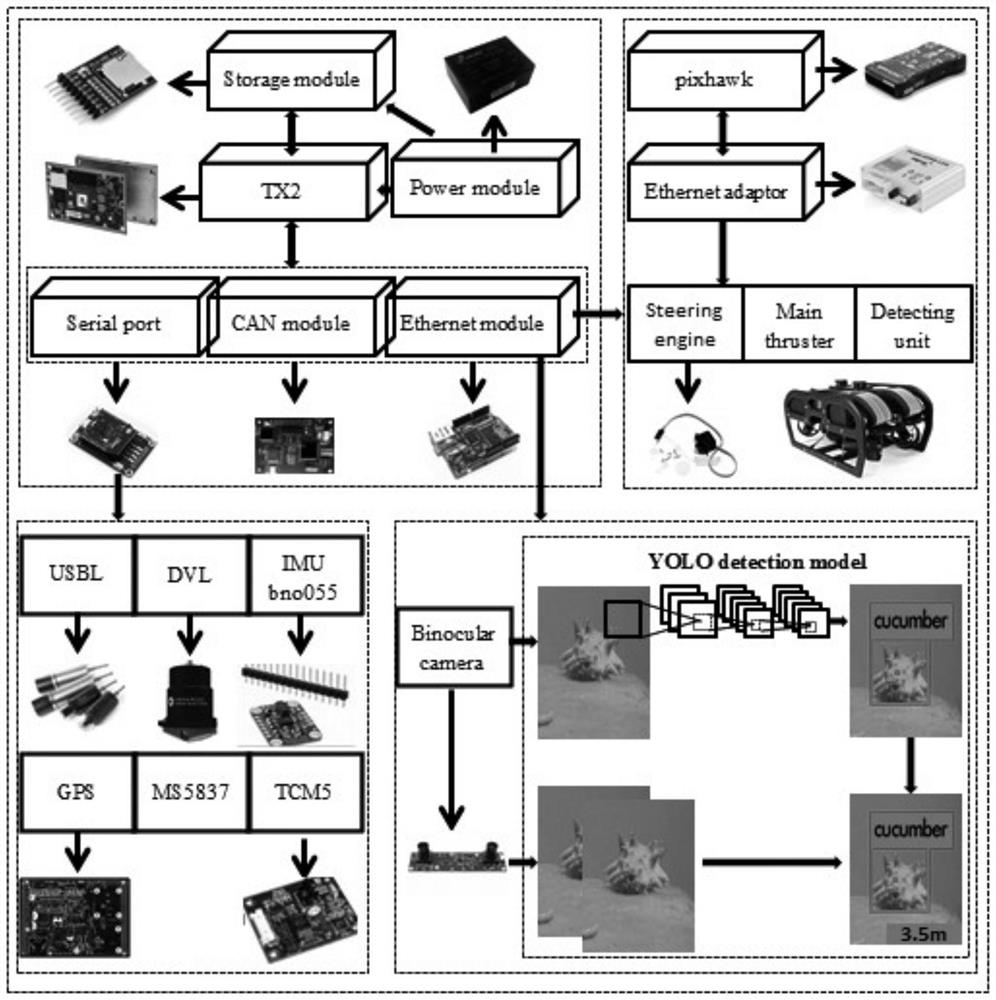
[0027] Step 1. Equipped with ROV (Underwater Robot Control Platform), in which the Raspberry Pi is used as the upper computer, responsible for image transmission and basic calculations, the Intel Network Neural Stick is used as the Raspberry Pi coprocessor for deep learning model calculations, and the flight controller is used as the motion controller. control platform. The hardware block diagram of the present invention is as figure 1 shown.
[0028] Step 2. Collect the underwater sea cucumber video (1920*1080 pixels, 25 frames per second) collected by the underwater robot motion control platform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com