


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
UAV interaction system based on gesture recognition, and control method thereof
An interactive system and control method technology, applied in the design field of the UAV interactive system and its control method, can solve the problems that UAV control is not simple, fast, intelligent, etc., achieve good practicability and scalability, increase Real-time, accelerated effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
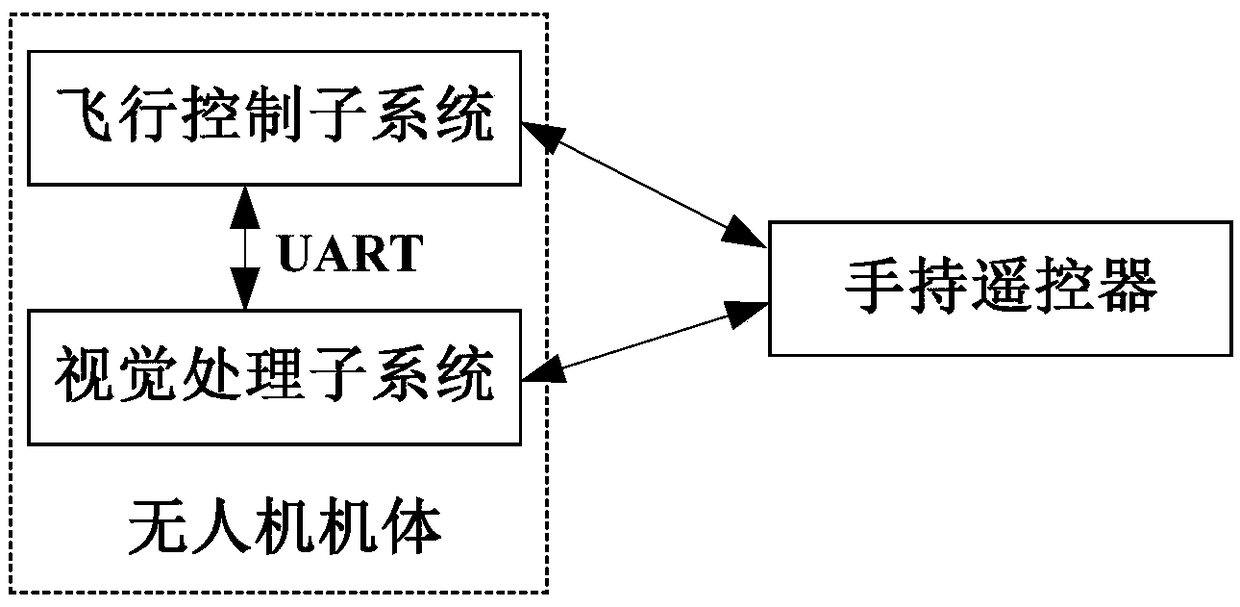
[0060] The embodiment of the present invention provides a UAV interaction system based on gesture recognition, such as figure 1 As shown, it includes the UAV body, vision processing subsystem, flight control subsystem and handheld remote control; the vision processing subsystem and flight control subsystem are built on the UAV body, and communicate with each other through the UART interface , the handheld remote controller communicates with the vision processing subsystem and the flight control subsystem respectively; the vision processing subsystem is used to obtain the video image of the environment where the UAV body is located, and process it to obtain the results of target detection and attitude recognition; The control subsystem is used to control the UAV body to perform corresponding actions and tasks according to the results of target detection and attitude recognition; It is also used to control the take-off of the drone body.
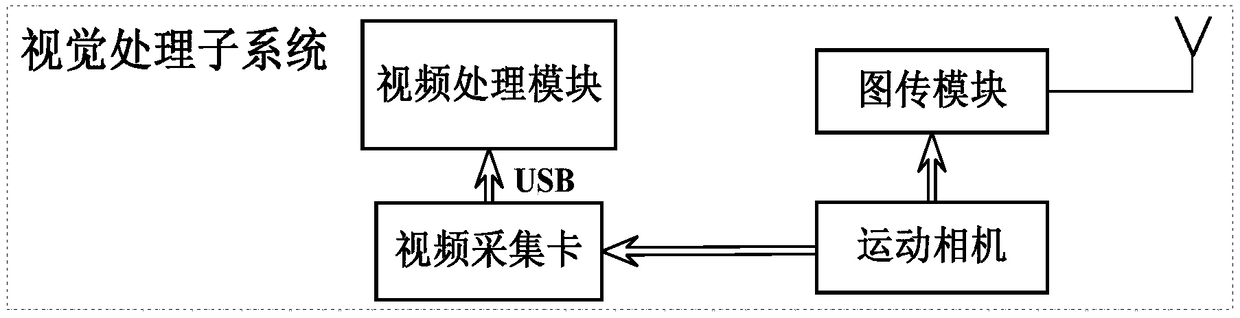
[0061] Such as figure 2 As shown, th...
Embodiment 2
[0066] The embodiment of the present invention provides a control method of the UAV interaction system based on gesture recognition, such as Figure 4 As shown, the following steps S1-S12 are included:
[0067] S1. Use the handheld remote control to control the UAV body to take off, hover at the set height, and collect environmental video images through the 3-degree-of-freedom rotation of the motion camera in the vision processing subsystem.
[0068] In the embodiment of the present invention, the set height is 10-15m.
[0069] S2. Judging whether the operator is detected according to the environmental video image, if so, proceed to step S3, otherwise repeat step S2 until the detection time threshold is reached, and control the drone body to land autonomously.
[0070] In the embodiment of the present invention, when detecting the operator, it is necessary to adjust the position and posture of the UAV in a small range according to the posture, direction, acceleration of the U...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com