Implementation method for improving target executing efficiency of mobile robot
A mobile robot and implementation method technology, applied in the field of robotics, can solve the problems of few optimization methods, rarely used task transfer function, intelligent AGV scheduling software, low degree of automation, etc., to optimize efficiency, save manpower, and save effect of time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
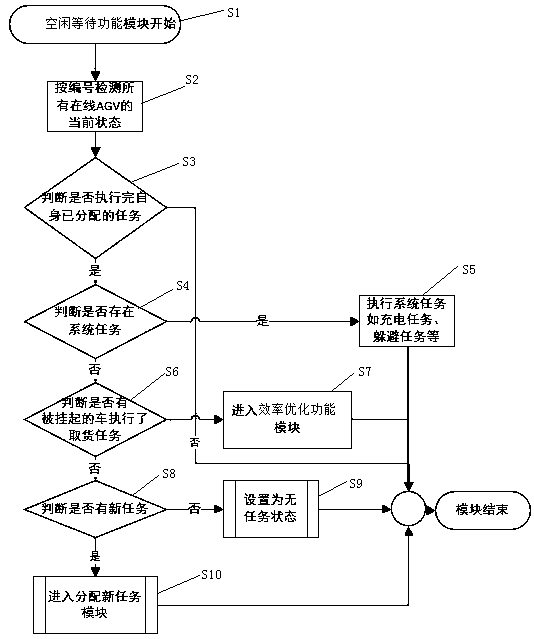
[0040] In an embodiment, an implementation method for a mobile robot to improve the efficiency of task execution, perform task assignment operations, and realize timely processing of tasks. When performing tasks, there are blocked AGVs and there are idle and unblocked AGVs. The present invention will The task is transferred to a more suitable AGV to improve the efficiency of task execution.
[0041] The implementation method includes the implementation method of the following functional modules:
[0042] 1) The realization method of the idle waiting function module: query the task assignment after the AGV task is completed and whether there is a new task or a high-priority system task;
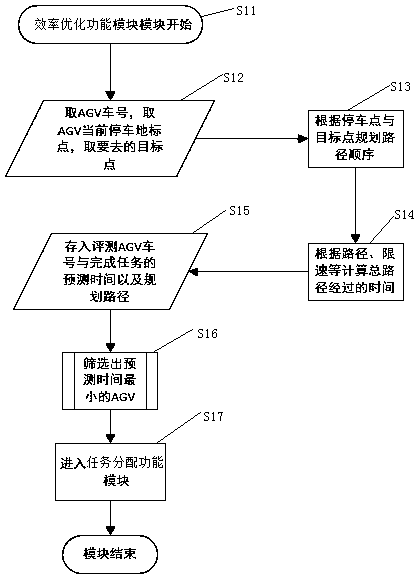
[0043] 2) Implementation method of efficiency optimization function module: evaluate the efficiency of idle AGV to target task, involving path calculation;
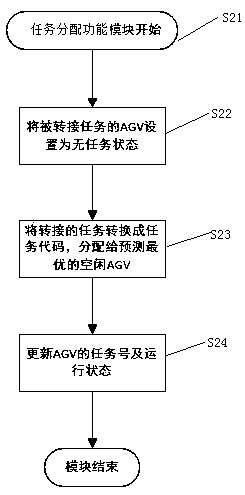
[0044] 3) Implementation method of task allocation function module: After receiving the transfer task, execute the corresponding task.
[0045] A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com