Discrete multi-cycle repeat controller for periodic servo system
A technology of repetitive controller and servo system, which is applied to controllers with continuous output signals, electric controllers, etc., which can solve the problems of slow multi-period interference signals, poor dynamic quality, and long control time lag.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
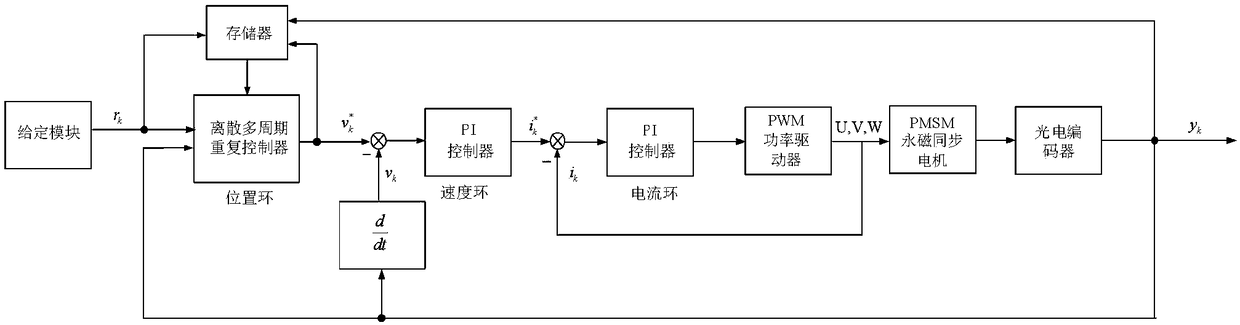
[0173] Taking the permanent magnet synchronous motor servo system as an example to perform repeated tracking tasks composed of multiple periodic signals in a fixed interval, the given position reference signal has periodic symmetry characteristics, and the motor adopts three-loop control, in which the speed loop and The current loop controllers are all provided by the ELMO driver, and the PI algorithm is used to adjust, and the discrete multi-cycle repetitive controller designed by the present invention is used as the position loop controller in the three-loop control system of the motor, which is provided by the DSP development board (see figure 1 ). For a position reference signal with periodic symmetry, when the motor servo system enters the steady-state stage, the system disturbance will also exhibit the same periodic symmetry. Designing a position loop controller requires the establishment of mathematical models of servo objects other than the position loop, including cur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com