Path planning method of unmanned belt obstacle
A path planning and unmanned driving technology, which is applied to road network navigators, measuring devices, instruments, etc., can solve problems such as limiting operation efficiency, manpower consumption, and drivers' inability to complete work according to standards for a long time, so as to improve efficiency and Effects on job safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] While the invention will be described in conjunction with examples, it should be understood that these examples do not limit the invention. On the contrary, the invention is intended to cover alternatives, modifications and equivalents as included in the invention as defined by the appended claims. Furthermore, in the following detailed description of the invention, numerous specific details are set forth in order to provide a thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without these specific details. Well-known methods and procedures are not described in detail. In practical applications, corresponding hyperparameter adjustments are required to face different vehicle conditions, different work requirements, and different geographical environments.
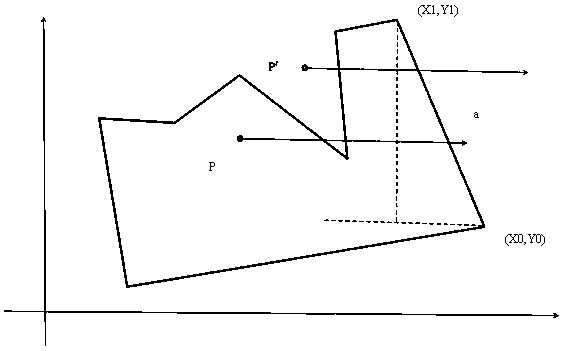
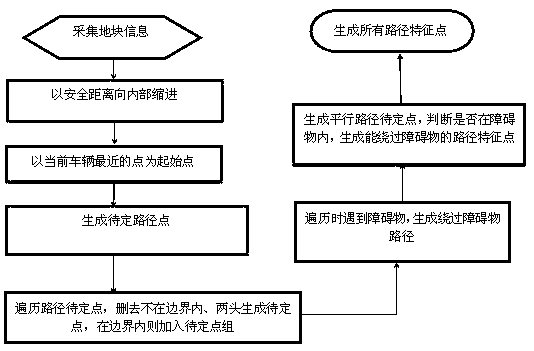
[0025] In the specific implementation of the present invention, firstly, the geographic information collection and ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com