A Calibration Method of Attitude Angle Error of Dual-axis Rotary Inertial Navigation System
An inertial navigation system and dual-axis rotation technology, applied in the field of inertial navigation, can solve the problem of increasing attitude error, reduce the impact and improve the attitude accuracy of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The technical solutions protected by the present invention will be described in detail below with reference to the accompanying drawings.
[0065] The attitude angle error calibration method proposed by the present invention is suitable for general platform-type inertial navigation systems, and most of the general platform-type inertial navigation systems adopt a two-frame three-axis structure, that is, a gyroscope, an accelerometer, an outer frame, an inner frame and a platform The gyroscope and the accelerometer are mounted on the platform platform, and the outer frame, the inner frame and the platform platform can rotate around the outer ring axis, the inner ring axis and the platform body axis respectively.
[0066] A method for calibrating an attitude angle error of a dual-axis rotary inertial navigation system, comprising the following steps:
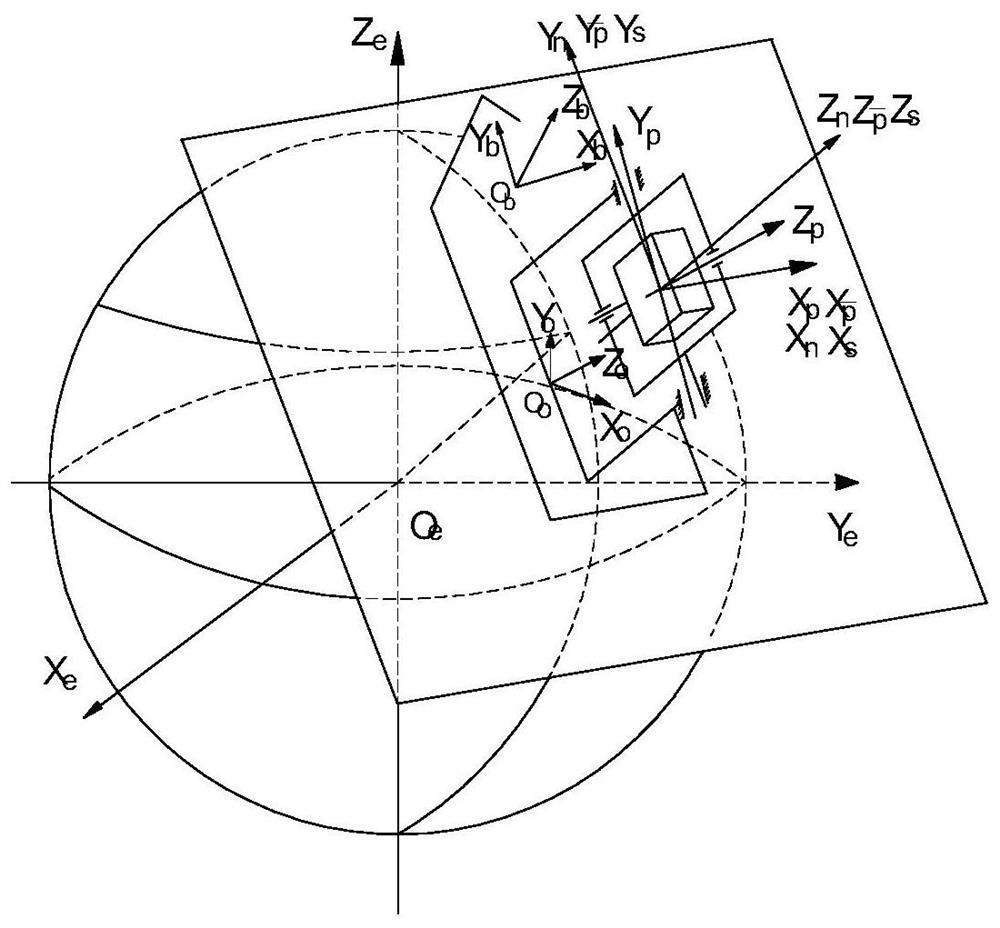
[0067] Step 1: Construct the coordinate system, figure 1 A schematic diagram of each coordinate system constructed by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com