Robust BSLAM method for AUV terrain matching navigation
A terrain matching and robust technology, applied in navigation, surveying and navigation, navigation computing tools, etc., can solve problems such as poor anti-interference ability and poor reliability, so as to reduce the impact, improve real-time performance and consistency, and realize global optimization Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Further describe the present invention below in conjunction with accompanying drawing:
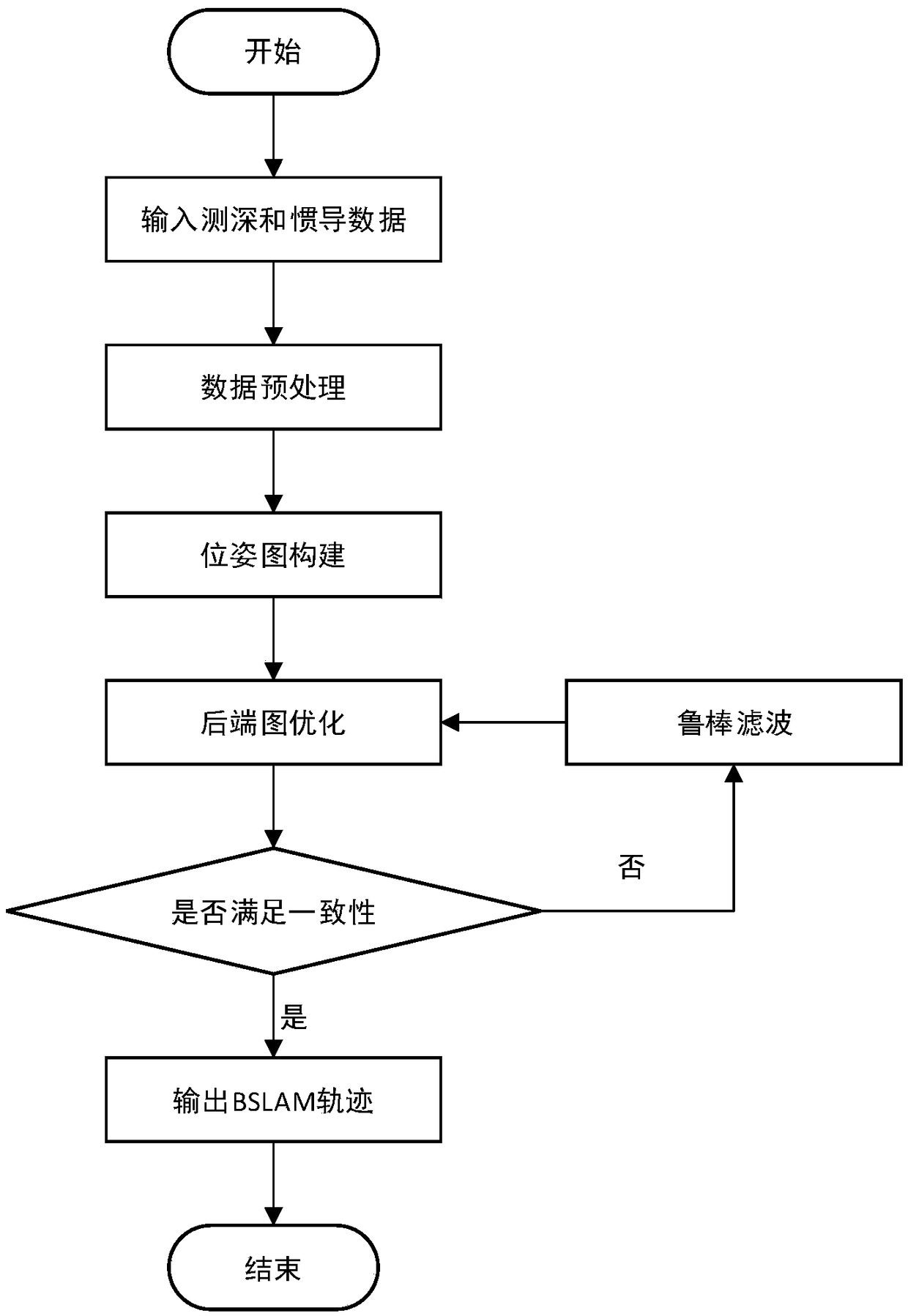
[0051] Such as figure 1 , a robust BSLAM method for AUV terrain matching navigation, including the following steps:
[0052] Step (1): Input bathymetry and inertial navigation data: When the AUV sails on the seabed for a long time and the inertial navigation data drifts too much, initialize the BSLAM, start the multi-beam sonar, collect the bathymetry and inertial navigation data of the seabed topography, and Continuous input into the BSLAM program;
[0053] Step (2): Data preprocessing: using the single ping filtering method of multi-beam bathymetric data based on the Alpha-Shapes model, the outliers in the multi-beam sonar bathymetric data are effectively eliminated, and the filtered bathymetric data are obtained ;
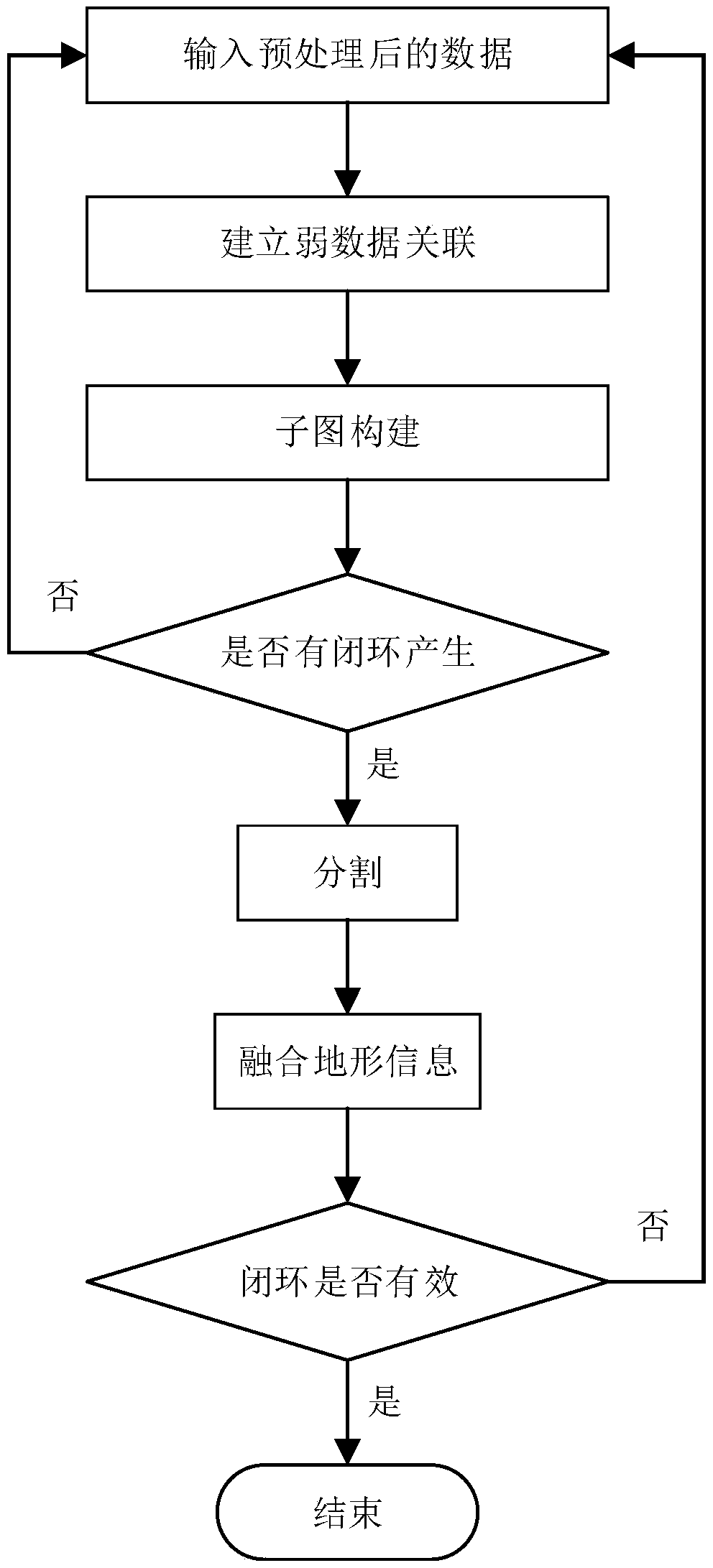
[0054] Step (3): If figure 2 , Pose graph construction: Gaussian process regression is used to estimate terrain depth and form weak data association; after the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com