Multifunctional modular robot head
A robot and multi-functional technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor interchangeability of internal structures, poor interchangeability and versatility, and inability to achieve comprehensive compatibility, so as to reduce comprehensive costs and shorten cycle, the effect of structure simplification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
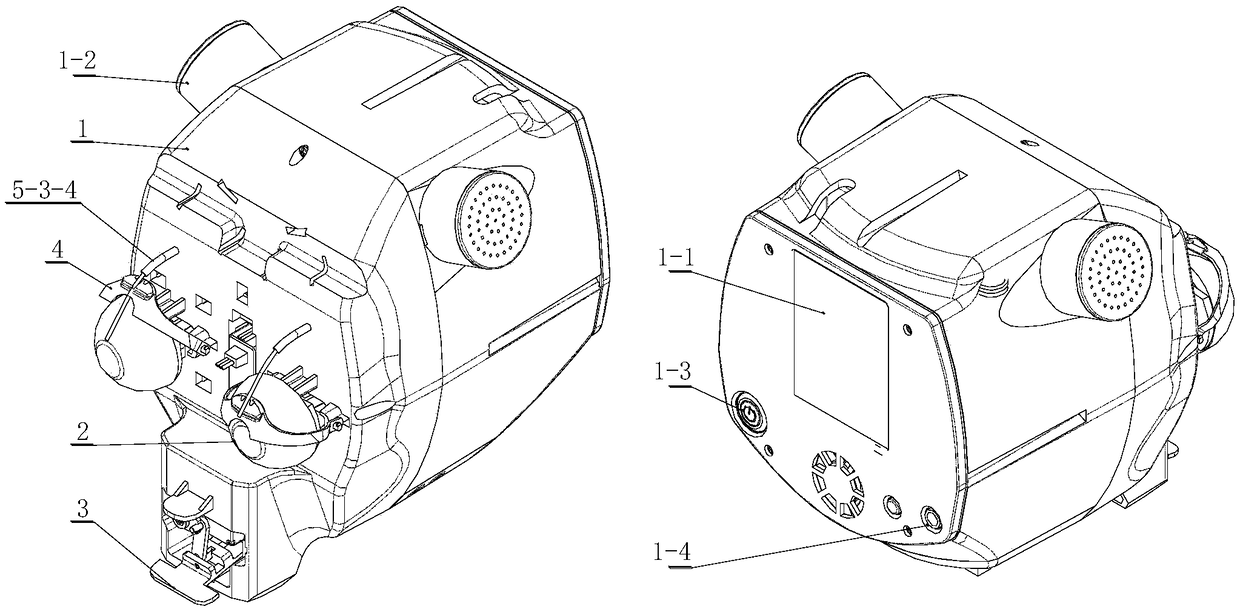
[0042] Such as figure 1 Shown is the head structure of the robot in this scheme, including the mask 1, eyeball 2, lip 3 and eyelid 4, the eyeball 2, lip 3 and eyelid 4 are arranged on one side of the mask 1 and respectively connected to the drive structure on the other side of the mask 1 5 connection; the driving structure 5 includes the eyeball driving mechanism 5-1;
[0043] In order to realize two actions by one power source (steering gear) and save costs; the eyeball drive mechanism 5-1 designed with a linkage link is adopted to make the left and right eyes rotate synchronously and in harmony;
[0044] Such as Figure 3-5Shown is the eyeball driving mechanism 5-1, including: eyeball fixing frame 5-1-1, the first steering gear 5-1-2, the first swing arm 5-1-3 and the first connecting rod 5-1-4 ; The number of the first connecting rod 5-1-4 is 2 and is composed of a horizontal connecting rod 5-1-4-1 and a vertical connecting rod 5-1-4-2 connected to each other, and the eye...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Rotation angle | aaaaa | aaaaa |
| Rotation angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com