Lidar target detection method based on grid and density clustering algorithm
A density clustering algorithm and laser radar technology, applied in the field of information perception and recognition, can solve the problems of large amount of cloud data, long algorithm search time, troublesome and other problems, and achieve the effect of reducing search time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The technical solutions and beneficial effects of the present invention will be described in detail below in conjunction with the accompanying drawings.
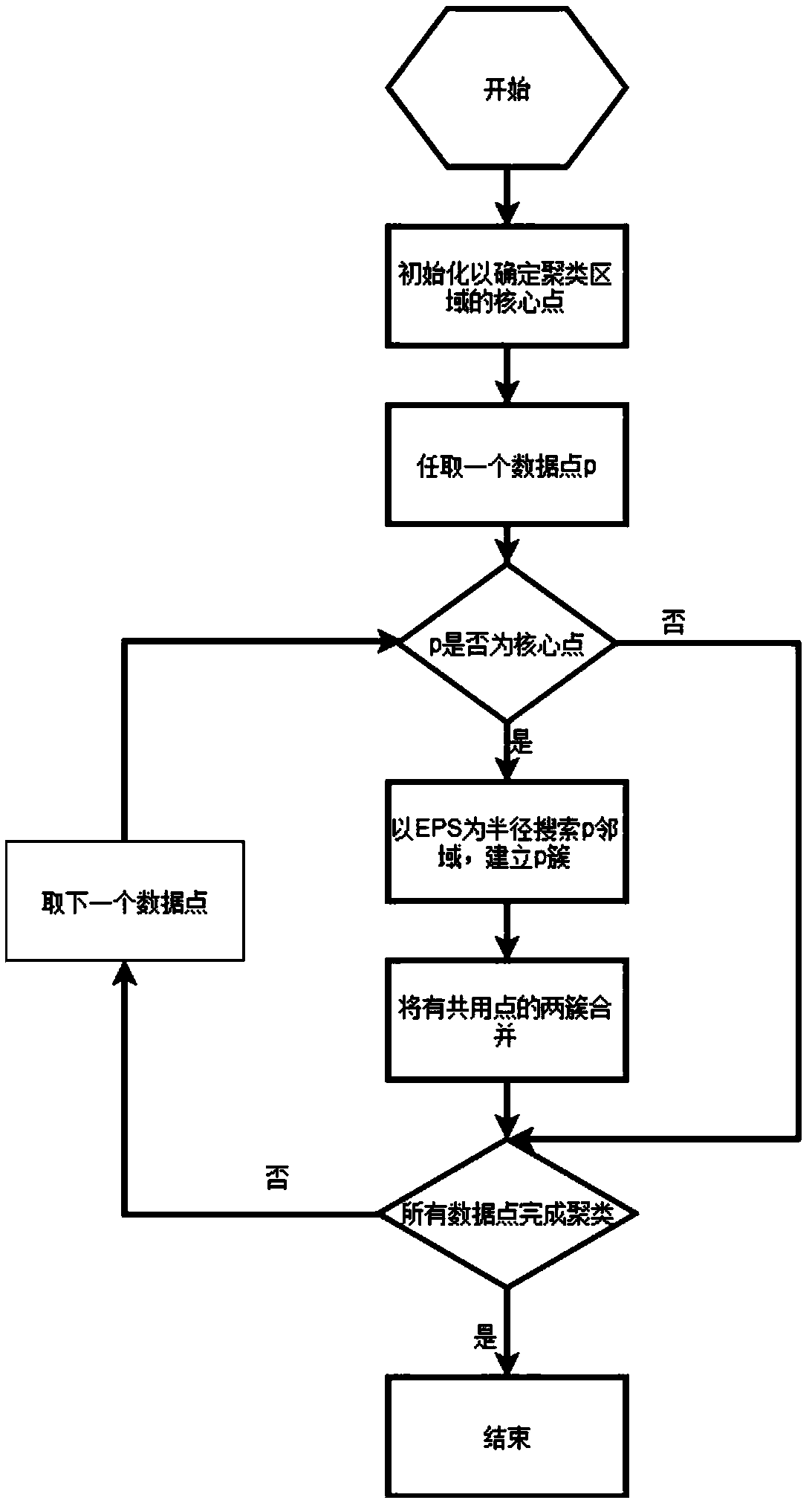
[0025] Such as figure 1 As shown, the present invention provides a laser radar target detection method based on a grid and density clustering algorithm, and its specific process steps are as follows:
[0026] (1) Obtain and analyze the original data of the lidar. The data package of the lidar contains important information such as distance, vertical angle, and horizontal angle. These information are expressed in hexadecimal, and they need to be extracted and converted into three-dimensional The form of the coordinates.
[0027] (2) Establish a grid map and perform data projection. The size of the grid is related to the horizontal resolution of the lidar. Assuming that the horizontal resolution of the lidar is close to 20cm but less than 20cm, the size of the grid should be 20cm. After the grid map is established, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com