Training method and system for rope traction upper limb rehabilitation robot based on admittance control
A rehabilitation robot and training method technology, applied in the field of medical rehabilitation, can solve the problems of insufficient active participation of patients and complex algorithms, etc., and achieve the effect of enhancing active participation and improving the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
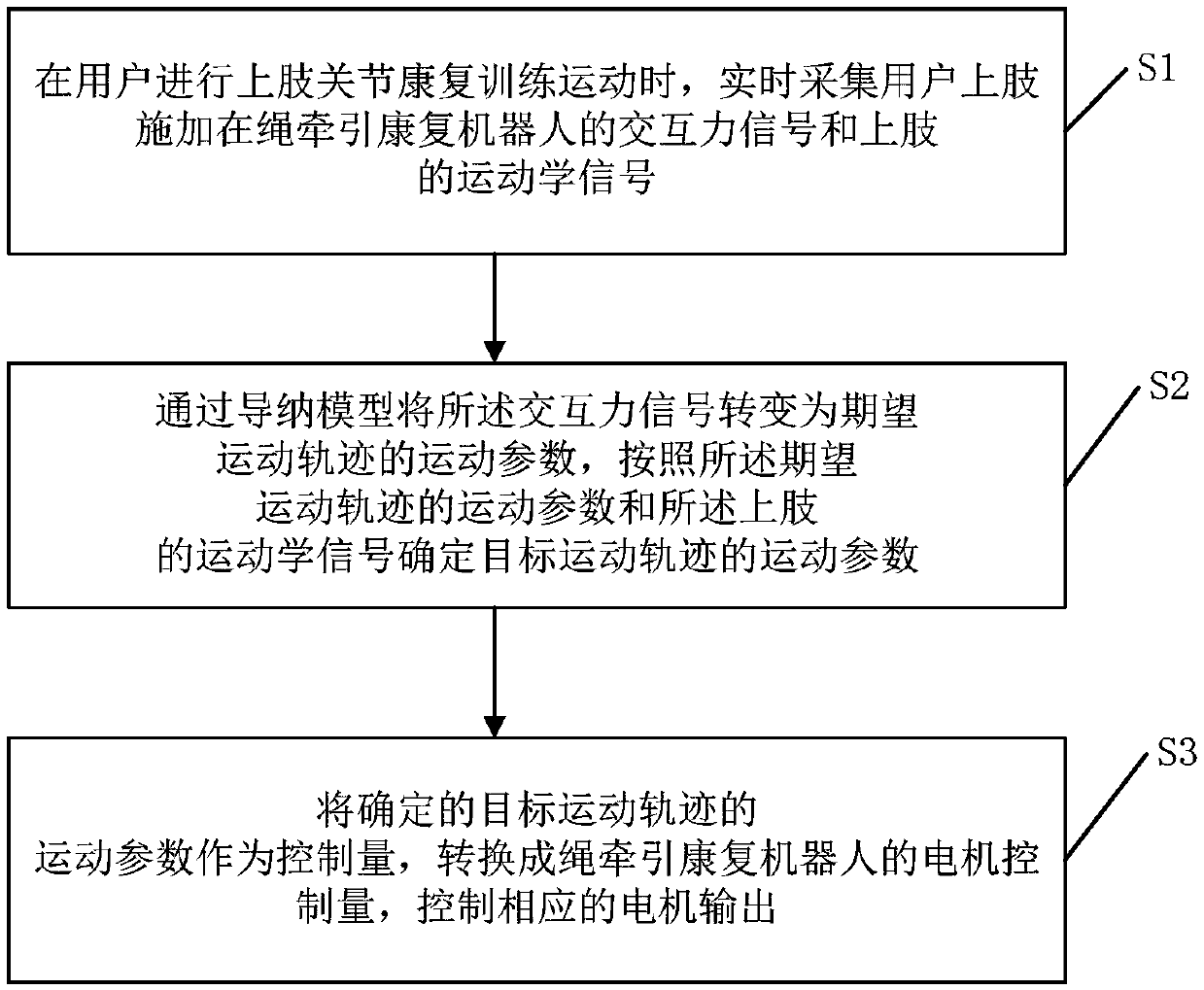
[0038] see figure 1 , the embodiment of the present invention provides a kind of training method based on the rope traction upper limb rehabilitation robot of admittance control, comprises the following steps:
[0039] S1. When the user performs upper limb joint rehabilitation training exercise, real-time collection of the interactive force signal and the kinematic signal of the upper limb exerted by the user's upper limb on the rope traction rehabilitation robot;
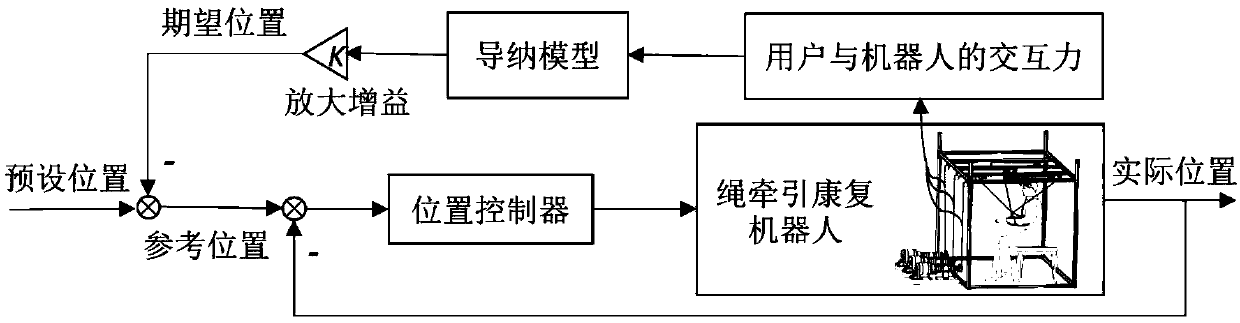
[0040] When the user performs rehabilitation training exercises, the admittance control does not preset the trajectory, and the target trajectory is determined only by the collected interactive force signal exerted by the user's upper limbs on the rope-tracted rehabilitation robot.
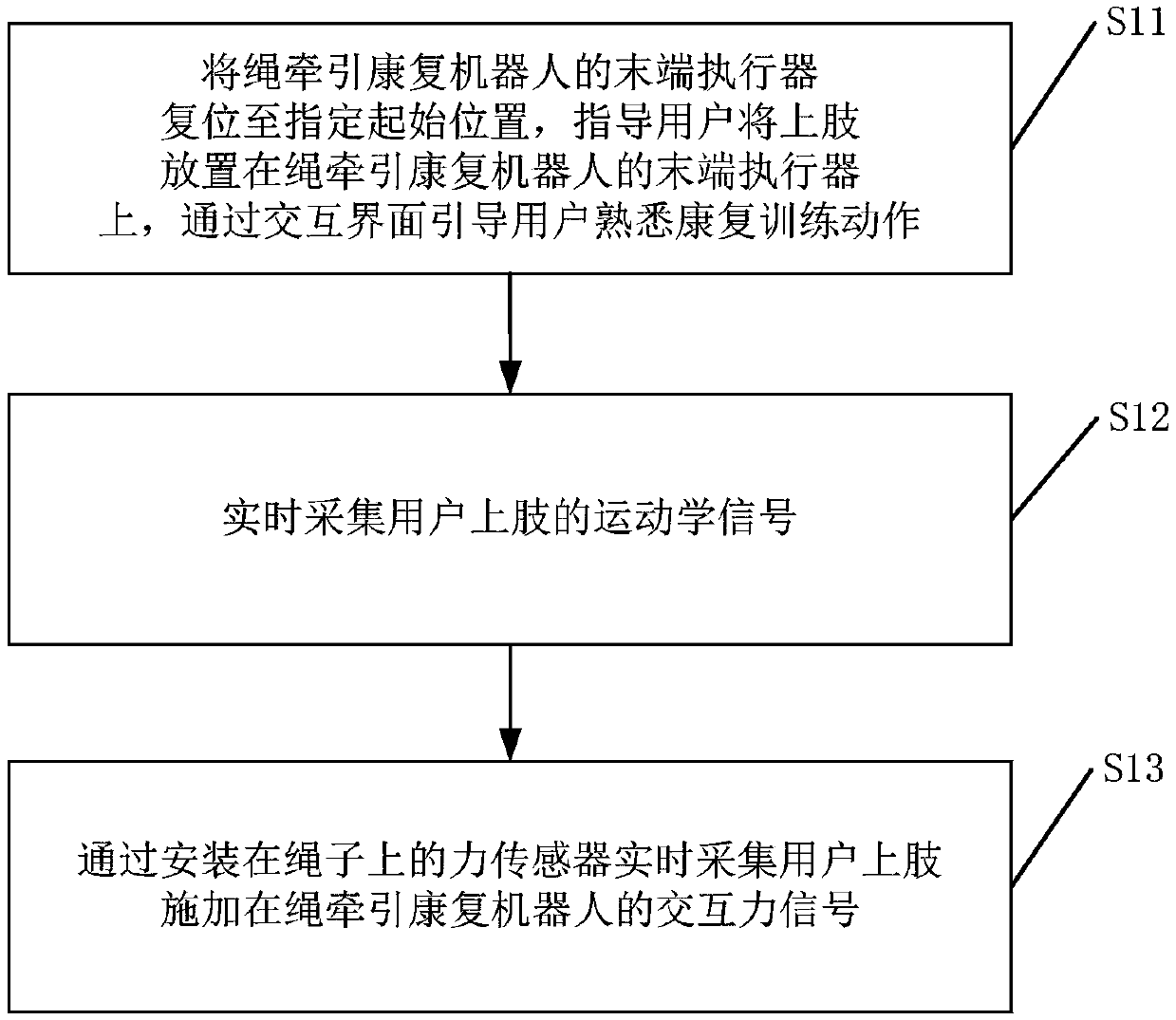
[0041] Such as figure 2 As shown, the step S1 specifically includes the steps:
[0042] S11. Reset the end effector of the rope traction rehabilitation robot to the designated starting position, guide the user to place the upper lim...
Embodiment 2
[0055] An embodiment of the present invention provides a training method for a rope-tracted upper limb rehabilitation robot based on admittance control, the steps of which are as follows: Figure 4 Shown:
[0056] S0, when the user performs the maximum tension test, collect the maximum tension signal, and preset the threshold according to the collected maximum tension signal;
[0057] In this step, the maximum pulling force signal is taken as a preset threshold as a percentage. The percentage is formulated according to the motor function of different users.
[0058] S1. When the user performs upper limb joint rehabilitation training exercise, real-time collection of the interactive force signal and the kinematic signal of the upper limb exerted by the user's upper limb on the rope traction rehabilitation robot;
[0059] This step is the same as step S1 in the first embodiment, and also includes steps S11, S12, and S13.
[0060] S1 / 1. Judging whether the interaction force...
Embodiment 3
[0094] The present invention also provides a training system for a rope-tracted upper limb rehabilitation robot based on admittance control, which can implement the training method in the above-mentioned embodiments.
[0095] see Figure 5 , is a schematic structural diagram of a training system for a rope-tracted upper limb rehabilitation robot based on admittance control provided by the present invention. The training system of the rope traction upper limb rehabilitation robot based on admittance control includes a signal acquisition module A, a signal transmission module B, a host control module C and a host interaction module D.
[0096] Each module of the training system of the rope traction upper limb rehabilitation robot based on the admittance control of the present embodiment is described in detail as follows:
[0097] The signal acquisition module A is used to collect the interactive force signal and the kinematic signal of the upper limb applied to the rope tractio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com