A real-time filtering system and method for random noise of a MEMS gyroscope
A random noise and gyroscope technology, applied in the field of inertial navigation, can solve the problems of poor measurement accuracy, poor real-time performance and stability, and inability to obtain gyroscopes, and achieve the effect of solving inconsistent noise characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
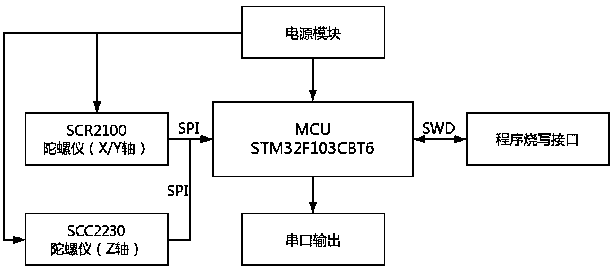
[0098] like figure 1 Shown is a schematic diagram of the hardware structure of the present invention, the power module is electrically connected to the MEMS gyroscope and the microprocessor MCU, the MEMS gyroscope includes a gyroscope for measuring X / Y axis signals and a gyroscope for measuring Z axis signals, and the gyroscope and MCU Connected through the signal line, the original signal measured by the gyroscope is input to the MCU and filtered by the algorithm module inside the MCU, and the filtered signal is output in real time through the serial port. The MCU is also connected with a program writer interface for writing the filter to the MCU. Algorithmic programs required.
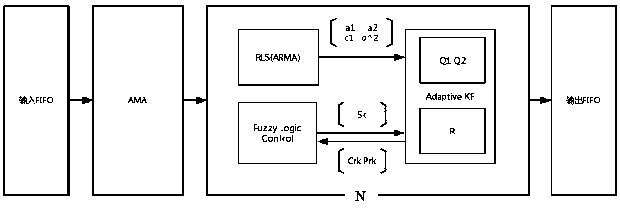
[0099] like figure 2 Shown is a schematic diagram of the algorithm module of the present invention, the algorithm module of the present invention is integrate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com