Flexible magnetic adsorption underwater wall climbing robot
A wall-climbing robot and magnetic adsorption technology, applied in the direction of motor vehicles, ship construction, ships, etc., to achieve the effect of meeting the speed of operation and reducing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
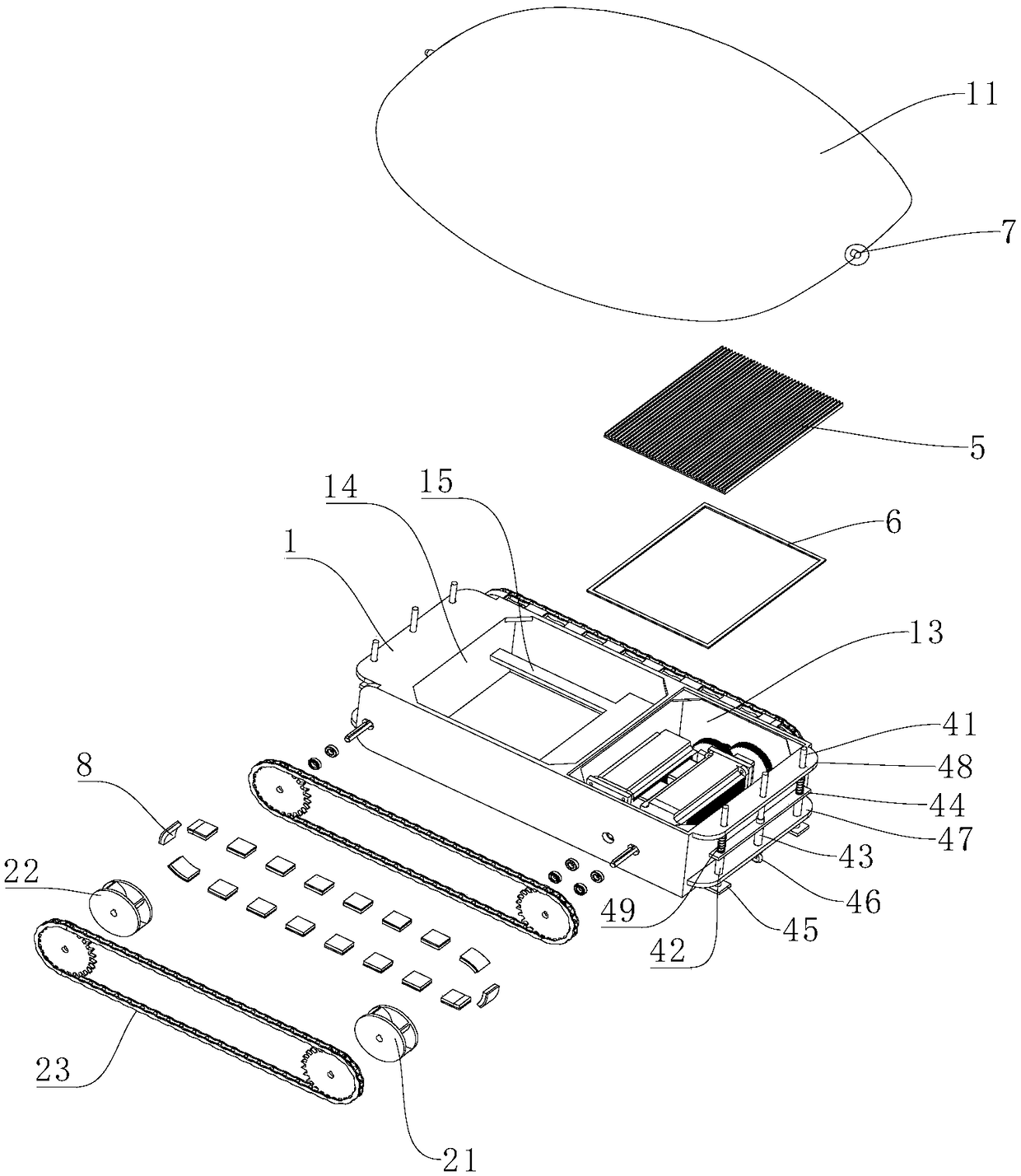
[0023] Such as figure 1 with figure 2 As shown, a flexible magnetic adsorption underwater wall-climbing robot includes a body 1, a flexible magnetic adsorption crawler walking device and a magnetic force compensation device. The body 1 is made of duplex stainless steel, which can be placed in seawater to corrode the body 1 . The body 1 includes a bottom shell and an outer cover 11. The outer cover 11 is covered on the bottom shell. The outer cover 11 is a turtle-back type cover 11, which can reduce the resistance of the robot moving in deep sea. The body 1 is provided with a working chamber 14, and the working chamber 14 is provided with a working head mounting seat 15. The working head mounting seat 15 is equipped with a high-pressure cavitation nozzle, and the high-pressure cavitation nozzle sprays water to clean the surface of the ship.
[0024] The flexible magnetic adsorption crawler walking device includes a servo motor and a crawler belt. The servo motor is installed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com