Unmanned aerial vehicle path planning method based on parallel heuristic algorithm
A heuristic algorithm and path planning technology, which is applied in the direction of vehicle position/route/height control, non-electric variable control, instruments, etc., to achieve the effect of increasing convergence speed, improving diversity and accuracy, and realizing dynamic path planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0047] A method for path planning based on a parallel heuristic algorithm proposed in this embodiment, such as figure 1 As shown, it contains two parts. One is to model the UAV path planning problem and obtain the cost function for evaluating the quality of the path. The other is to use the parallel heuristic algorithm to obtain the flight path of the UAV. The following two parts The contents are explained separately.
[0048] (1) Modeling the UAV path planning problem.
[0049] Step A, mathematically modeling the operating environment of the UAV.
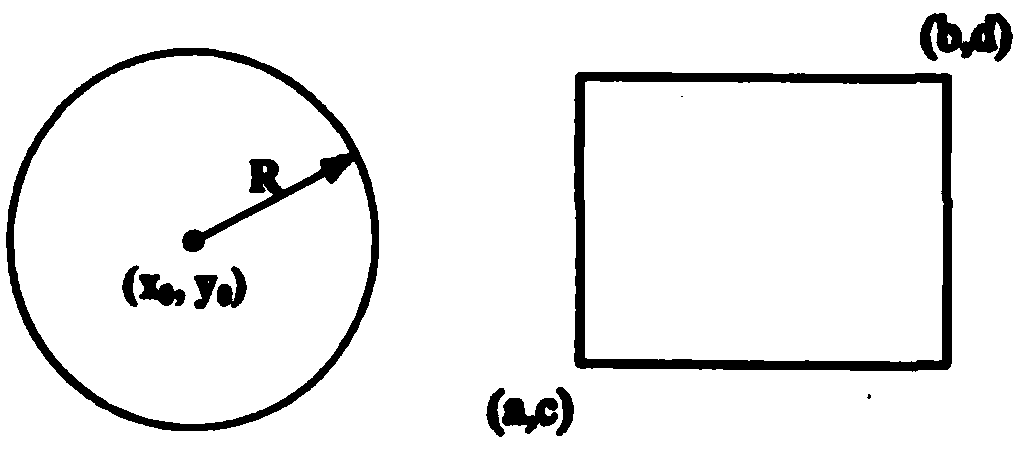
[0050] Such as Figure 4 As shown, the path planning is carried out in the two-dimensional plane, and the UAV flies from the starting point S to the terminal T to perform the task. A global coordinate system O-XY is established in the path planning area, and a path is formed by N points. The p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com