Plant protection UAV (unmanned aerial vehicle) cluster cooperative control method
A plant protection drone and collaborative control technology, applied in the field of plant protection drone cluster collaborative control, can solve the problem that plant protection drone clusters cannot realize automatic collaborative control of agricultural pests and diseases monitoring and pesticide application operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In order to have a further understanding and understanding of the structural features of the present invention and the achieved effects, the preferred embodiments and accompanying drawings are used for a detailed description, as follows:
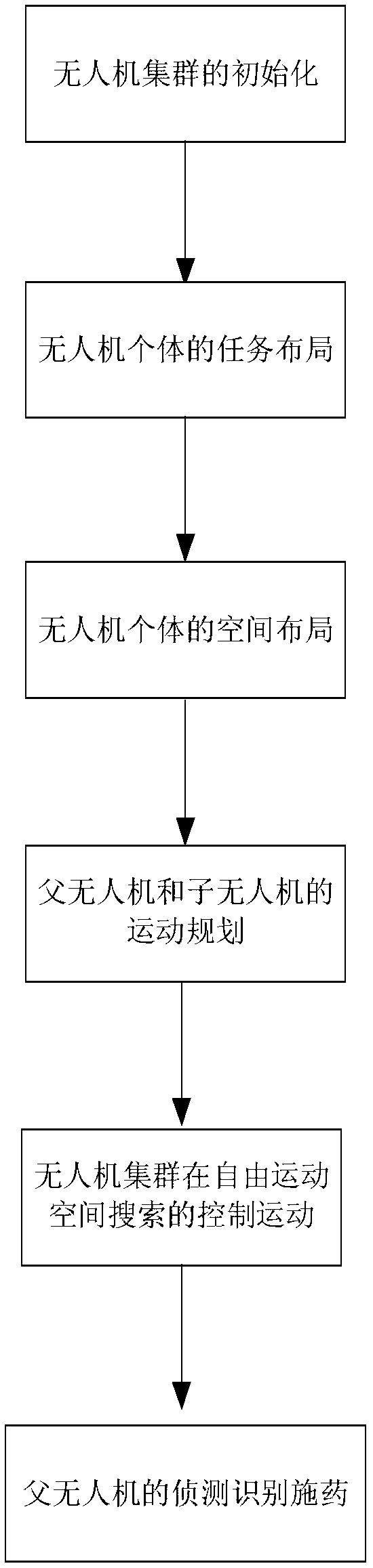
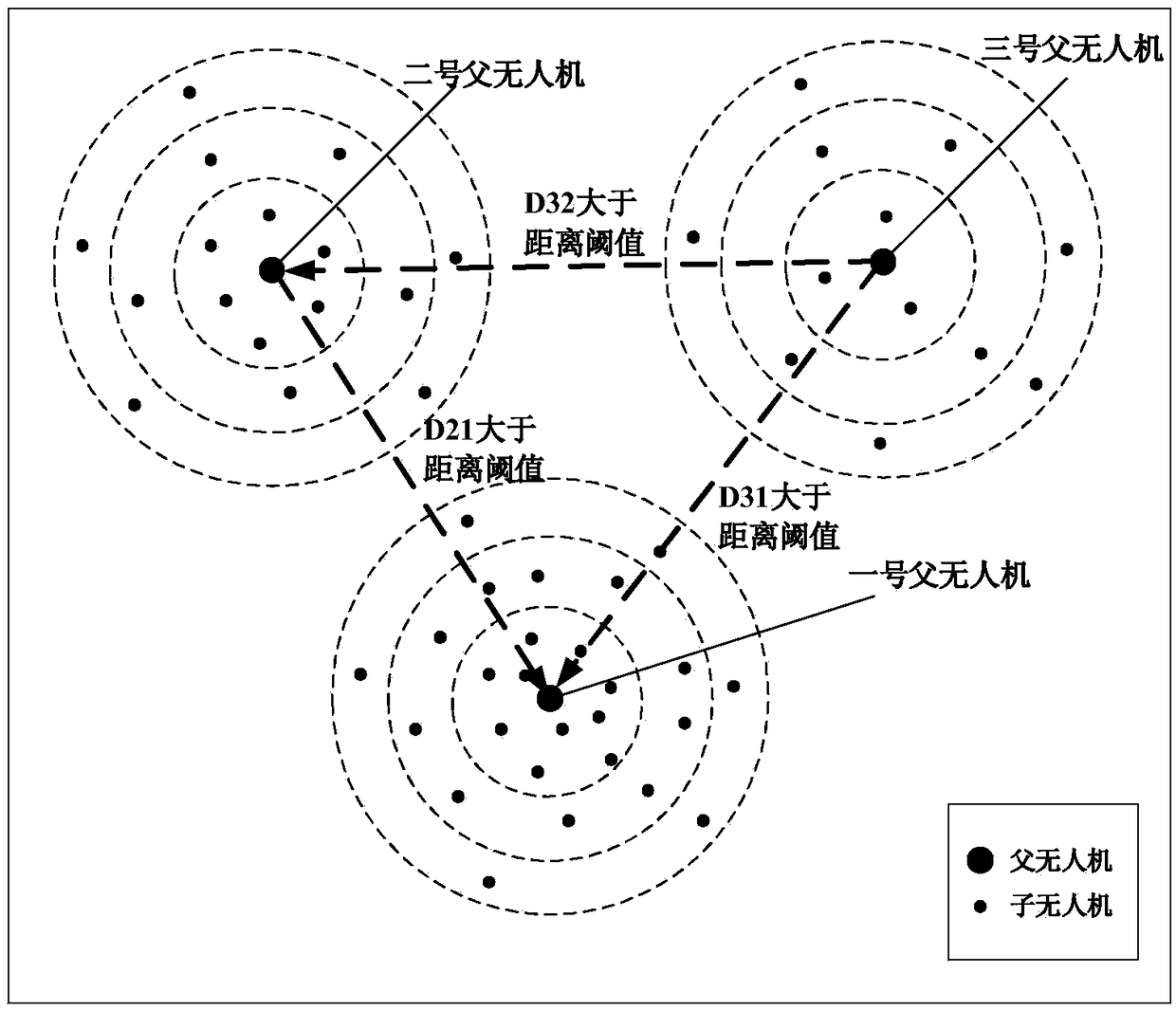
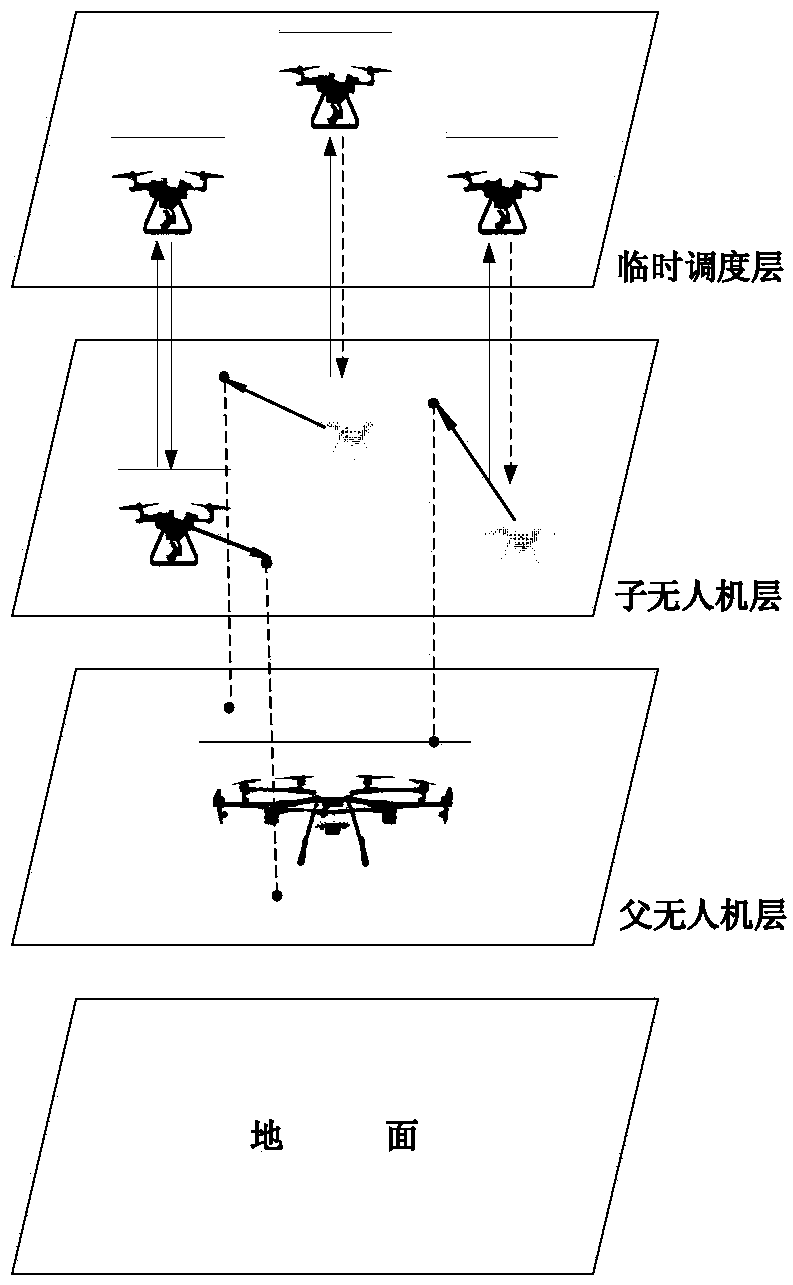
[0088] In order to quickly construct a map of disease and insect pest density in large-scale agricultural planting areas, the present invention proposes a "control model based on the evolution of plant population distribution" in the interconnection and collaborative control of UAV clusters for plant protection to determine the UAV cluster for plant protection. Global change, build a group structure in which the parent UAV carries multiple offspring individual UAVs, and design the mission planning and motion planning functions of the parent UAV and child UAV respectively. The parent drone macroscopically guides the sub-drone to carry out the spatial layout and allocates the free movement space of the sub-drone. The sub-drone explores t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com