An Adaptive Control Circuit for Shock Absorption and Noise Reduction of Rocket Fairing
A technology of adaptive control and fairing, applied in the direction of adaptive control, general control system, mechanical oscillation control, etc., can solve the problems of difficult development and seldom application of control modules, so as to completely eliminate noise disturbance, ensure normal operation, easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] An adaptive control method for shock and noise reduction of a rocket fairing, comprising the following steps:
[0043] S1, establish the controller model, the equation is as follows:
[0044] u(t)=K 1 x(t)+K 2 (t) (1)
[0045] where u(t) is a 3-dimensional input vector, u(t) is a function of controller input with respect to time t, x(t) is a 4-dimensional column vector, x(t) is a function of system state with respect to time t, K 1 is a 3*4-dimensional vector matrix is the control gain of the system state, K 2 (t) to eliminate the effects of interference;
[0046] S2. Get K 1 Parameter value, K 2 (t) function expression, system external disturbance function w(t);
[0047] S21, K 1 Obtained by the following linear inequality matrix:
[0048] AQ+QA T -Z T B T -BZ<0 (2)
[0049] where Q=P -1 , Z=K 1 P -1 ;P -1 It is the inverse matrix of the matrix P, and P is a 4*4 matrix; T represents the transpose of the matrix; A is an n*n matrix, which is the coeffi...
Embodiment 2
[0075] In order to implement the method in Embodiment 1, this embodiment provides an adaptive control circuit for shock and noise reduction of a rocket fairing.
[0076] Connection instructions for each module
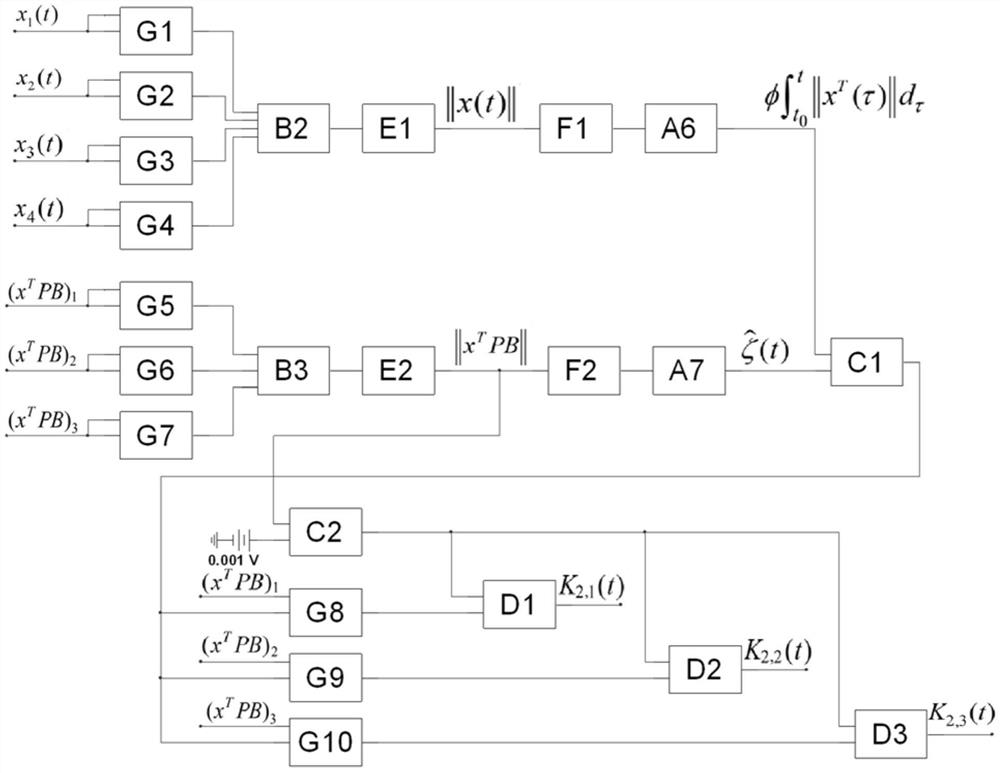
[0077] Such as Figure 16As shown, the circuit includes a rocket fairing structure controller and a structure model module, and the rocket fairing structure controller includes a vector signal module, a control gain module, and a control input module arranged in sequence, and the output terminals of the structure model module are respectively It is connected with the vector signal module, the control gain module and the control input module, and the output terminal of the control input module is connected with the input terminal of the structure model module. In this embodiment, the structure model module outputs 4 signals and inputs them into the vector signal module, the control gain module, and the control input module, the vector signal module outputs 3 signals in...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Resistance | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com