


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Gait planning method of quadruped robot based on central pattern generator, central pattern generator and robot
A quadruped robot, pattern generator technology, applied in the directions of instruments, attitude control, control/regulation systems, etc., to achieve the effects of improving stability, reducing pitch angle, and reducing roll range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0039] The gait planning method of the quadruped robot based on the central pattern generator of this embodiment is as follows: image 3 As shown in the figure, only the 3-way signal flow of the left front leg is drawn, and the signal flow for the other legs is similar.
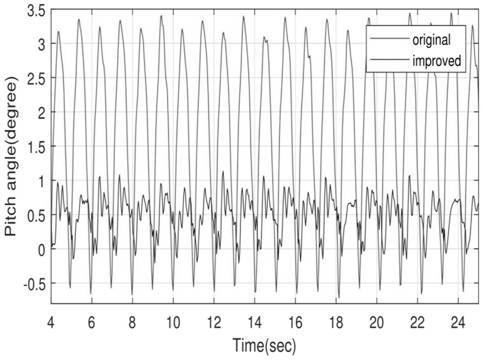
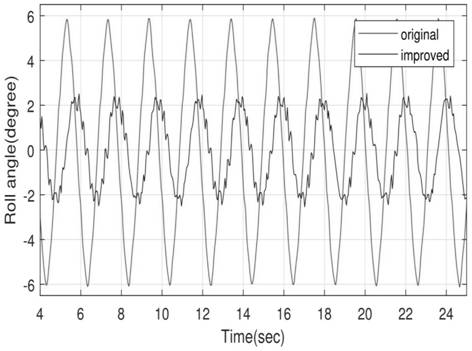
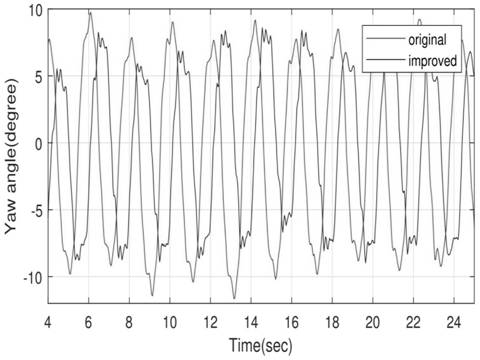
[0040] The quadruped robot system includes a quadruped robot body, an inertial measurement unit sensor, and a positioning sensor. Among them, the inertial measurement unit IMU (Inertial Measurement Unit) sensor and the positioning sensor GPS (GlobalPosition System) are installed in the quadruped robot body center of mass for measuring four The attitude angle, angular velocity and specific position of the body of the robot during the movement process. The attitude angle includes the pitch angle, yaw angle and roll angle. In order to realize the robot's movement process, the average value of the periodic changes of each attitude angle should be as close as possible. At 0, its amplitude is as small as possible, ...
specific Embodiment approach 2
[0059] In the gait planning method of the quadruped robot based on the central pattern generator of the present embodiment, the control signals of the three types of joints are as follows:
[0060] 1. Side swing joint signal:
[0061]
[0062] Among them, θ lsi Indicates the drive signal of the side swing joint of the i-th leg, A i is a constant, sign(ζ) is a sign function, and when the i-th leg represents the left front or left rear leg, ζ≤0, y i Represents one original output signal of the hopf oscillator network. Numbers 1, 2, 3, and 4 represent the left front leg, right front leg, left rear leg, and right rear leg, respectively.
[0063] Note: y i ≤0, indicating that the leg is in the swing phase.
[0064] 2. Hip joint signal:
[0065]
[0066] where x i is an output of the hopf oscillation network (with the y in the side swing joint signal i different roads), k i is a constant that determines the swing speed of the upper limb of each leg of the quadruped ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com