Unmanned aerial vehicle takeoff/landing guiding-oriented deep learning label data generation method
A technology of deep learning and labeling data, which is applied in the direction of electrical digital data processing, special data processing applications, vehicle position/route/altitude control, etc., can solve problems such as weak applicability, sensitive parameters, etc. Broad, Prioritized Scientific Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solution of the present invention will be further shown and described below in conjunction with the accompanying drawings of the description.
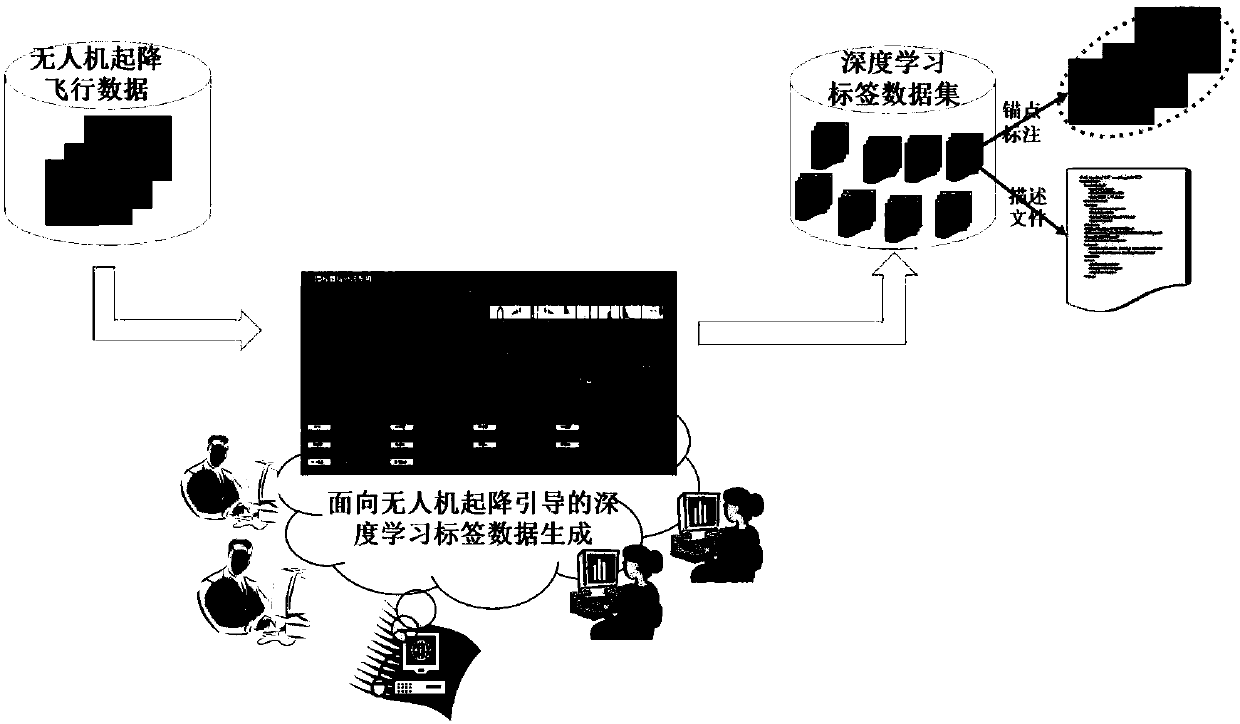
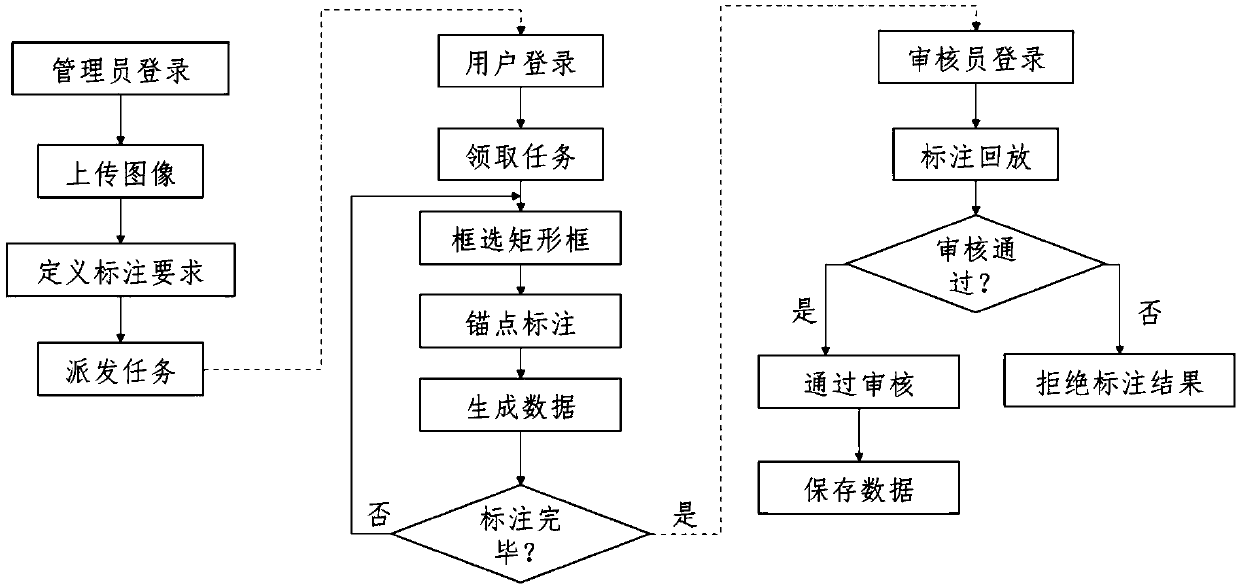
[0037] refer to figure 1 with 2 , a deep learning label data generation method for UAV take-off and landing guidance, the method is as follows;
[0038] (1) Establish a database system,
[0039] The administrator logs in to the administrator client and the administrator client establishes the database system. The administrator client manages the database system, can upload pictures to the database system, can delete pictures in the database system, and can save pictures in the database system. Perform queries and be able to export annotation results.
[0040] All the scene images to be marked are stored in the database system, among which the scene images to be marked include the scene images that contain drone targets during the take-off and landing process of the drone taken by the camera that have never been ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com