


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Attitude control and attitude measurement time-shared multiplexed spacecraft attitude control method
An attitude controller and attitude control technology, which is applied in attitude control, non-electric variable control, control/adjustment system, etc., can solve the problems of spacecraft attitude control accuracy reduction, improve attitude measurement and control accuracy, and reduce energy loss , to eliminate the effect of mutual coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
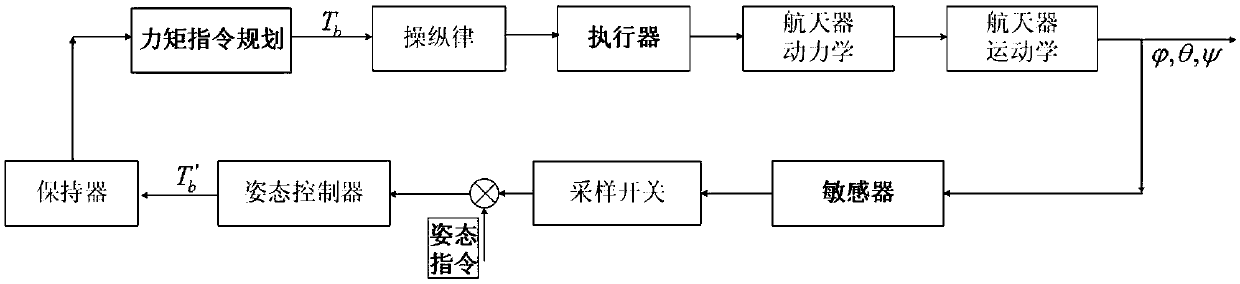
[0041] Specific implementation mode one: combine figure 1 , figure 2 The present embodiment is described. A spacecraft attitude control method for time-division multiplexing of attitude control and attitude measurement given in this embodiment specifically includes the following steps:
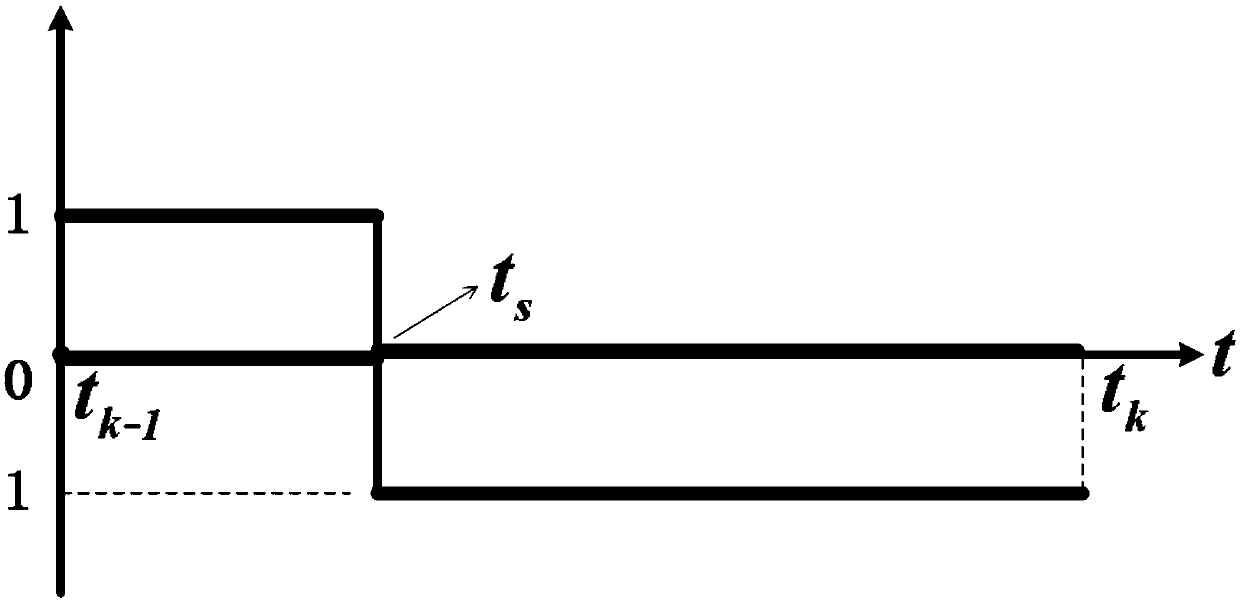
[0042] Step 1. Set the sampling period of the spacecraft attitude closed-loop control, and divide the sampling period of the unit spacecraft attitude closed-loop control into the attitude measurement time-sharing time interval and the attitude control time-sharing time interval; figure 1 shown.
[0043] Step 2: Carry out actuator torque command planning in the attitude control time-sharing time interval; the torque command planning method here can adopt trapezoidal command planning, rectangular command planning, triangular command planning, "s" type command planning, etc.;
[0044] Step 3, using the impulse equivalent principle to determine the torque command after the torque command planni...
specific Embodiment approach 2
[0047] Specific implementation mode 2: The difference between this implementation mode and specific implementation mode 1 is that the actuator torque command planning described in step 2 specifically includes:
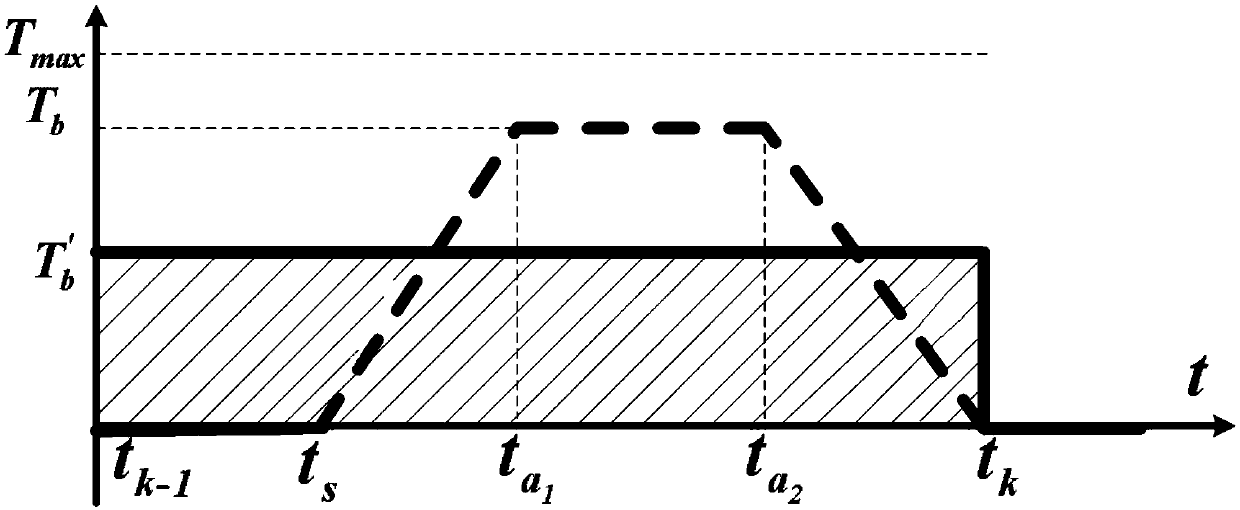
[0048] This embodiment adopts trapezoidal instruction planning in the attitude control time-sharing time interval, and the attitude control time-sharing time interval (t s ,tk ] is divided into the moment rising section in turn moment plateau and moment drop section The duration of the moment rising period, moment stable period and moment falling period is 1 / 3 of the attitude control time-sharing time interval, and the planned torque command is shown in the following formula (1):
[0049]
[0050] Among them, T(t) represents the actuator torque command at time t; t k-1 and t k Respectively, the k-th spacecraft attitude closed-loop control sampling period (t k-1 ,t k ] start time and end time (t k-1 It is also the end moment of the k-1 spacecraft attitude c...
specific Embodiment approach 3
[0053] Specific implementation mode three: the difference between this implementation mode and specific implementation mode two is that the determination of the torque command after the torque command planning described in step three specifically includes:
[0054] In the unit spacecraft attitude closed-loop control sampling period, in order to ensure the equivalent impulse before and after the torque command planning, the following equation (2) can be established by using the equivalent impulse principle:
[0055]
[0056] Among them, T′ b is the control torque provided by the attitude controller in the unit sampling period before time-division multiplexing;
[0057] Combining formula (1) and formula (2), we get:
[0058]
[0059] Among them, T b The torque command in the post-torque plateau segment is planned for the command.
[0060] Other steps and parameters are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com