Method for implementing straight-line trajectory tracking of unmanned inspection cruiser under ocean current influence
An implementation method and track tracking technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, which can solve problems such as deviation of simulation results and achieve good control effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0057] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
[0058] Ⅰ. Establish ocean current environment model:
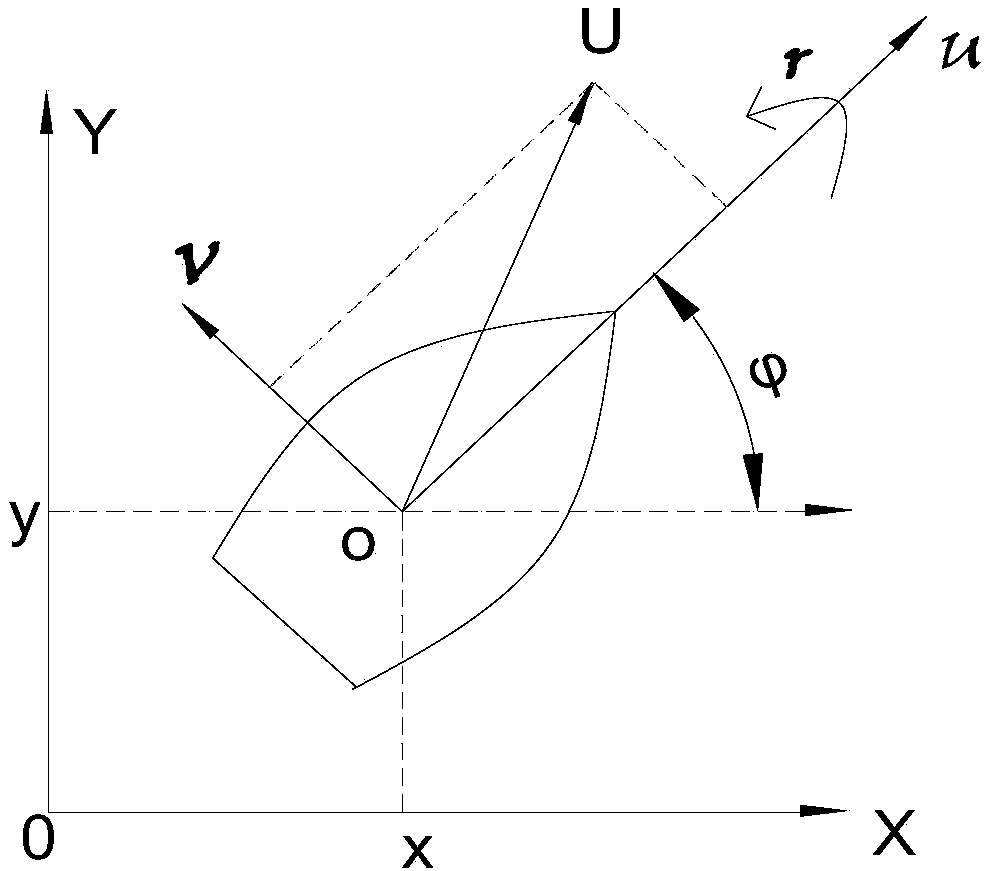
[0059] The working environment of the unmanned inspection ship in the marine aquaculture farm is the surface of the sea. Affected by the tide, sea breeze, and seawater density changes in different locations near the coast, the horizontal and vertical surface movement of the ship will be directly disturbed. In order to analyze the impact of ocean currents on the navigation of unmanned ships, a discrete grid space in a two-dimensional Cartesian coordinate system (x, y) is established. △x and △y are the sizes of the grids in the x and y directions, respectively. A point q is defined as formula (1)
[0060] q=q(i,j), 0≦i
[0061] Among them, m and n are the maximum number of grids in the x and y axis directions respectively;
[0062] Such as figure 1 , The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com