A chute-type robot gripper for shearing
A robot hand and chute technology, applied in the directions of manipulators, accessories of shearing machines, shearing devices, etc., can solve the problems of parallel clamping, easy clamping of thin plates, strong clamping pressure, etc., and achieve the cylinder action direction and The effect of vertical clamping, flat gripper structure, and fewer parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
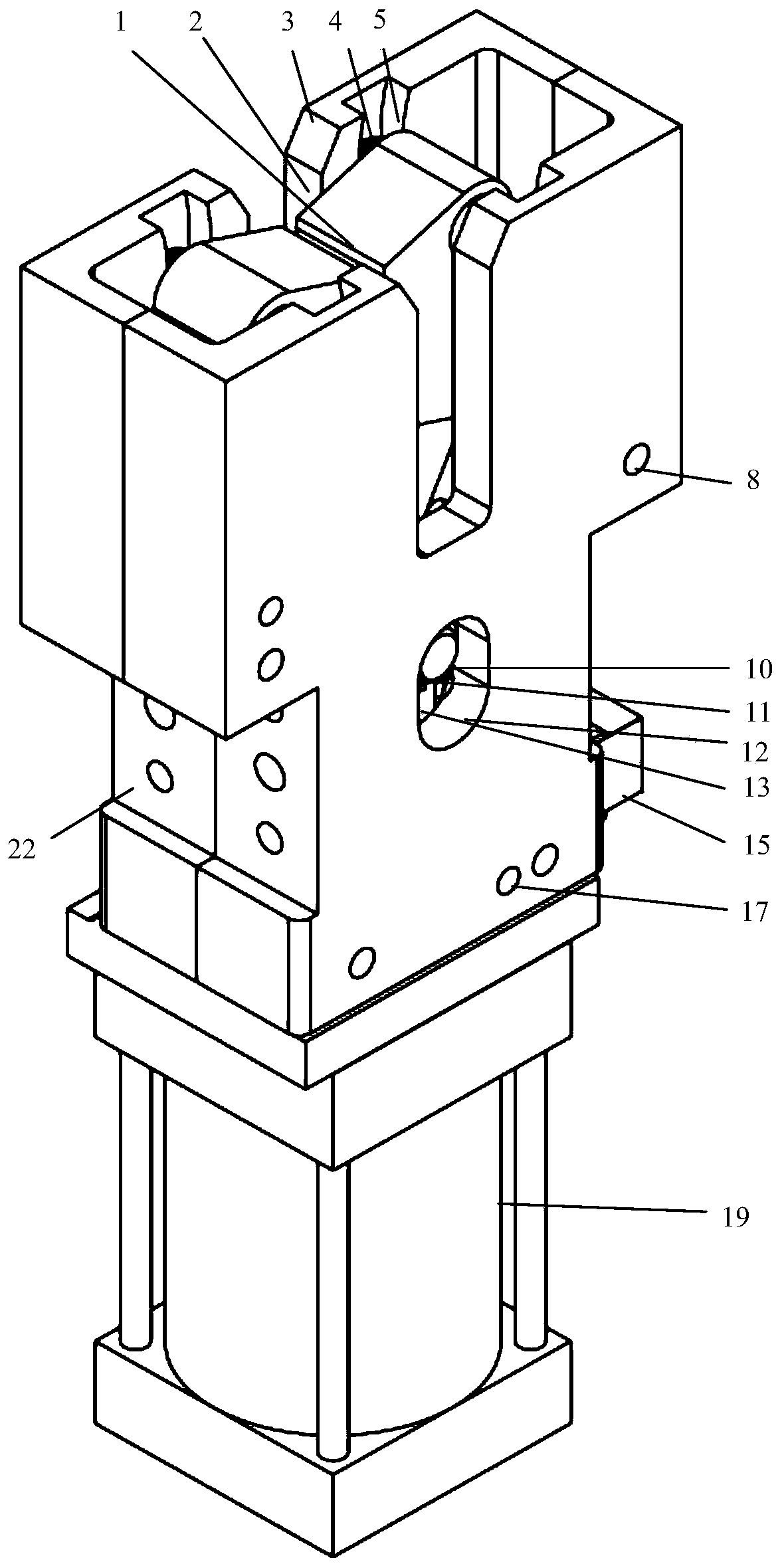
[0025] like Figure 1 ~ Figure 3 As shown, this embodiment provides a chute-type robotic gripper for shearing plates, including a housing 100, a chute-type clamping module 200, a position sensing module 300 and a driving module 400, and the housing 100 is provided with interconnected The chute-type clamping module 200 and the position sensing module 300 are connected to the driving module 400 at the lower end of the casing 100 .
[0026] The upper end of the housing 100 is a symmetrical clamping structure, and is provided with an arc-shaped chute and a middle chute 12. The arc-shaped...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com