Man-machine co-driving control system based on driver model and handling inverse dynamics and switching mode of man-machine co-driving control system
A driver model, inverse dynamics technology, applied in the power steering mechanism, control device, electric steering mechanism, etc., can solve the problem of impossible realization in the unmanned stage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
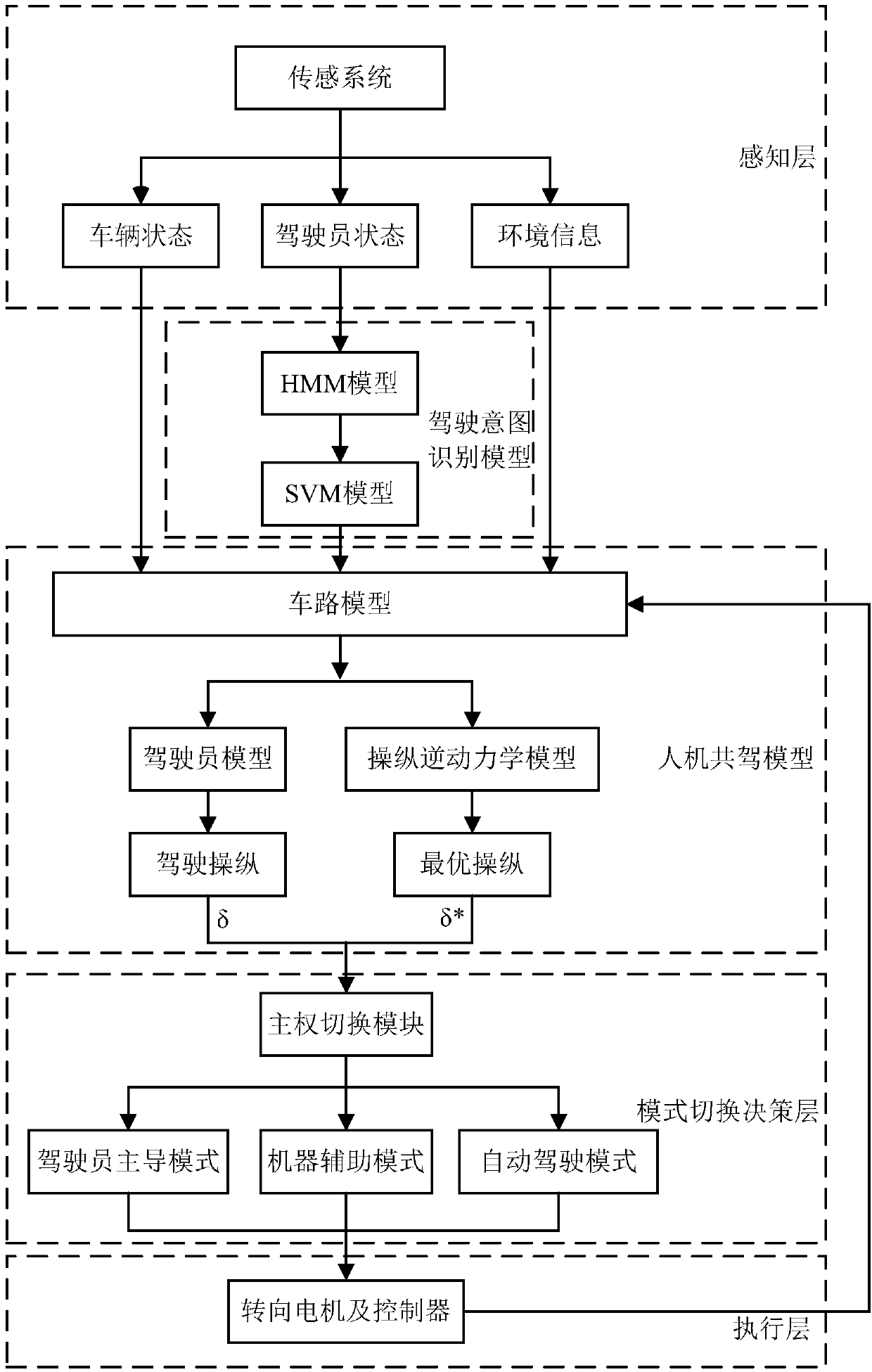
[0058] The invention is a man-machine co-driving control system and its switching mode based on a driver model and manipulation inverse dynamics. First, the sensor system detects the driver's action state signal, vehicle driving state signal, and driving environment signal. Among them, the driver state signal is transmitted to the driving intention recognition model, which is used to recognize the driving intention and pass it to the road model. At the same time, the vehicle driving state signal and driving environment signal are transmitted to the vehicle road model. Through the vehicle road model, the driver model and the steering inverse dynamics model, the actual driver's steering wheel angle signal and the ideal steering wheel angle are obtained, which are transmitted to the sovereign switching system. The sovereign switching system includes a switching decision module, which is used to judge and decide the driving mode and transmit the decision signal to the execution sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com