Multi-robot synergic movement control method
A technology of cooperative motion and control methods, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of unsuccessful linear solution, lack of robustness and scalability of the system, complex system model, etc., to overcome the lack of robustness. and the effect of scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037] Most studies in the prior art assume that global environmental information is known. However, in actual systems, general robots can only know the environmental information within the sensor range, and static obstacles may be added in the environment at any time. Therefore, the offline path planning algorithm proposed by knowing the global environment information is not suitable for the actual system.
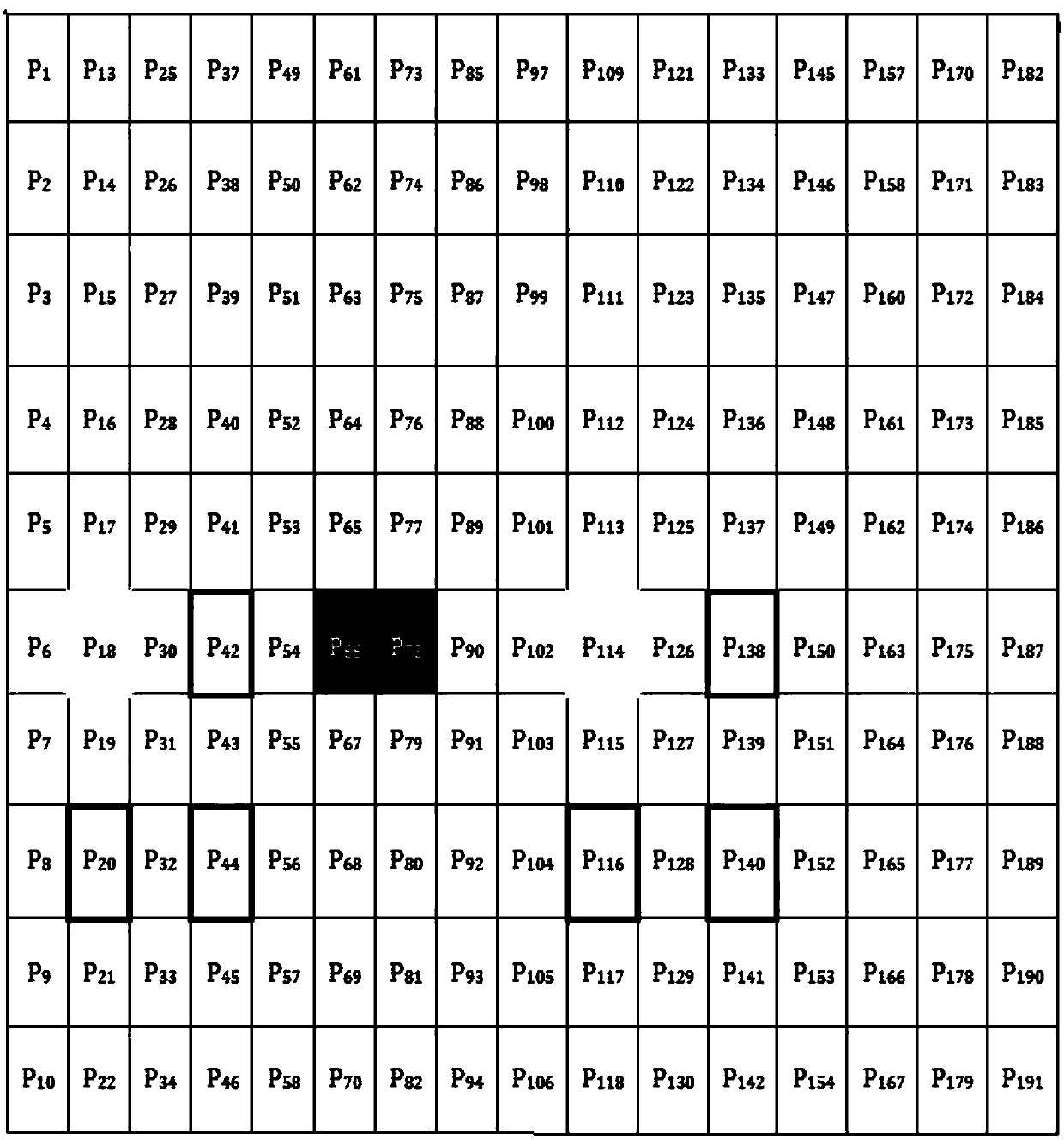
[0038] In order to solve the problems in the prior art, this embodiment provides a multi-robot cooperative motion control method. The robot working area is represented by a two-dimensional grid diagram, the working area is decomposed into blocks, and the cooperative control algorithm and real-time heuristics are adopted. The algorithm enables each robot to find the next position with the least total cost, satisfy the total CTL and move to the target position, avoid static obstacles in real time, and reach the target position through coordinated movement;
[0039] Among them, t...
Embodiment 2
[0043] On the basis of Embodiment 1, this embodiment provides a multi-robot cooperative motion control method, and the cooperative control algorithm includes the following steps:
[0044] Step 1) Initialize start i , Close_list i , Is_end i =False, where start i Indicates the current position of robot i, close_list i Represents the position point where the robot i no longer retrieves, is_end i Indicates whether the robot i has reached the target position, i=1, 2, 3, 4,..., n;
[0045] Step 2) If is_end i = False, continue to perform the following steps, if is_end i =True skip to step 8);
[0046] Step 3) Determine whether to add static obstacles in real time. If adding, add the location of the static obstacles to OBS realtime ; OBS realtime A collection of static obstacle positions added in real time;
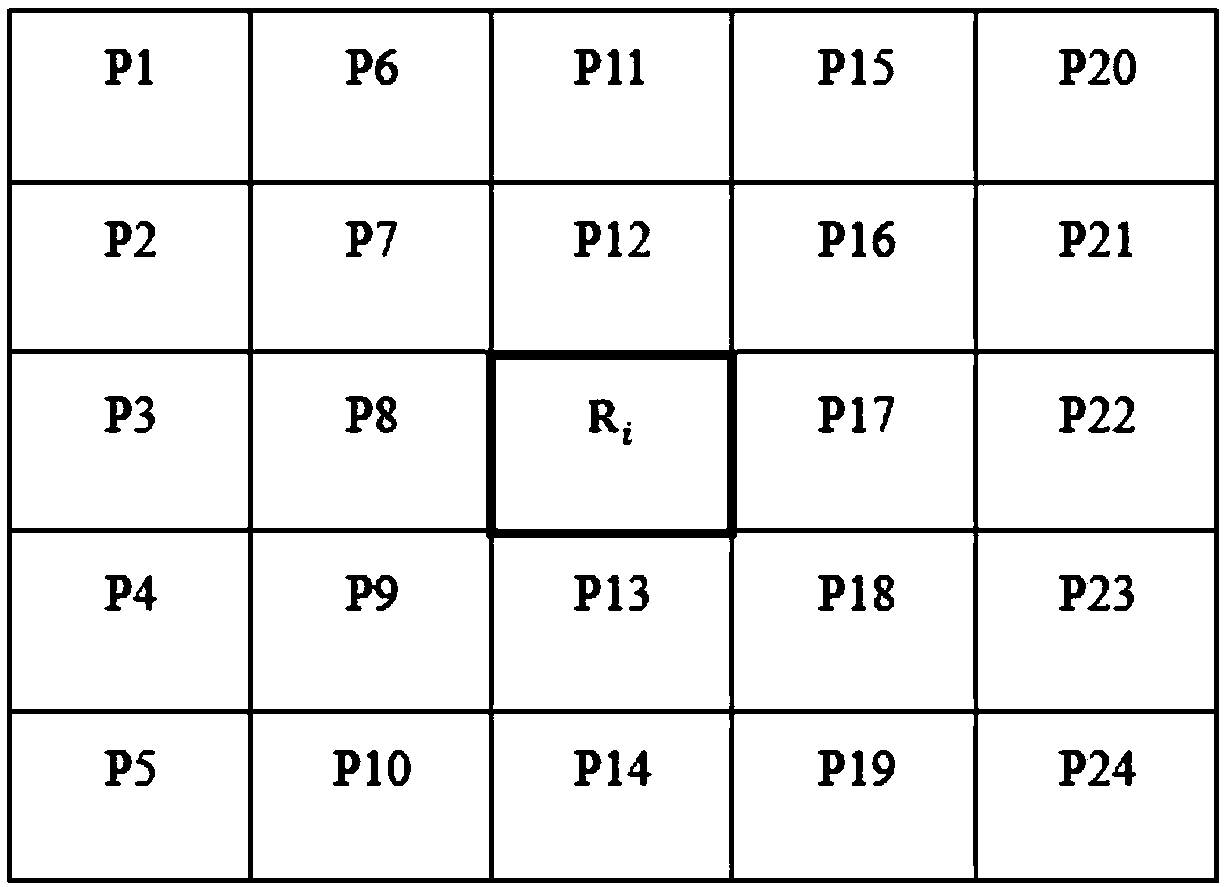
[0047] Step 4) Start the current position of each robot i The coordinates of the eight points around are added to the nearest after calculating the cost according to the heuristic algor...
Embodiment 3
[0059] On the basis of the foregoing embodiment, this embodiment uses the coordinated movement of four robots as an example for presentation.
[0060] The specific steps of the collaborative control algorithm are as follows:
[0061] Step 1) Initialize start i , Close_list i , Is_end i =False, where start i Indicates the current position of robot i, close_list i Represents the position point where the robot i no longer retrieves, is_end i Indicates whether the robot i has reached the target position, i=1, 2, 3, 4;
[0062] Step 2) If is_end i = False, continue to perform the following steps, if is_end i =True skip to step 10;
[0063] Step 3) Determine whether to add static obstacles in real time. If adding, add the location of the static obstacles to OBS realtime ; OBS realtime A collection of static obstacle positions added in real time;
[0064] Step 4) Start the current position of each robot i The coordinates of the eight points around are added to the nearest after calculating the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com