Automatic driving control method of distribution car based on deep q network
A control method and automatic driving technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of high cost, speed up the training process, and avoid the loss of delivery vehicles Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
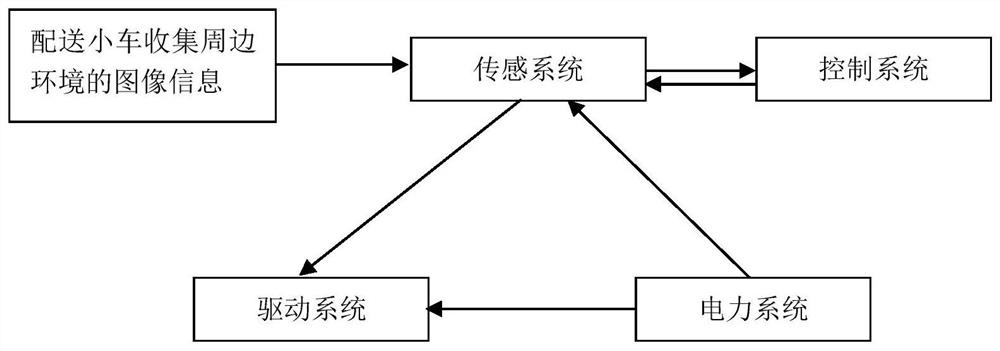
[0030] Example: see attached Figure 1~3 As shown, an automatic driving control method based on a deep Q network distribution car, including a sensor system, a control system, a drive system and a power system, the sensor system collects environmental information and power system information, and combines the environmental information and power system The system information is transmitted to the control system, and the control system processes the received information through a self-learning control method, and then the sensor system receives the control information to control the movement state of the distribution car.
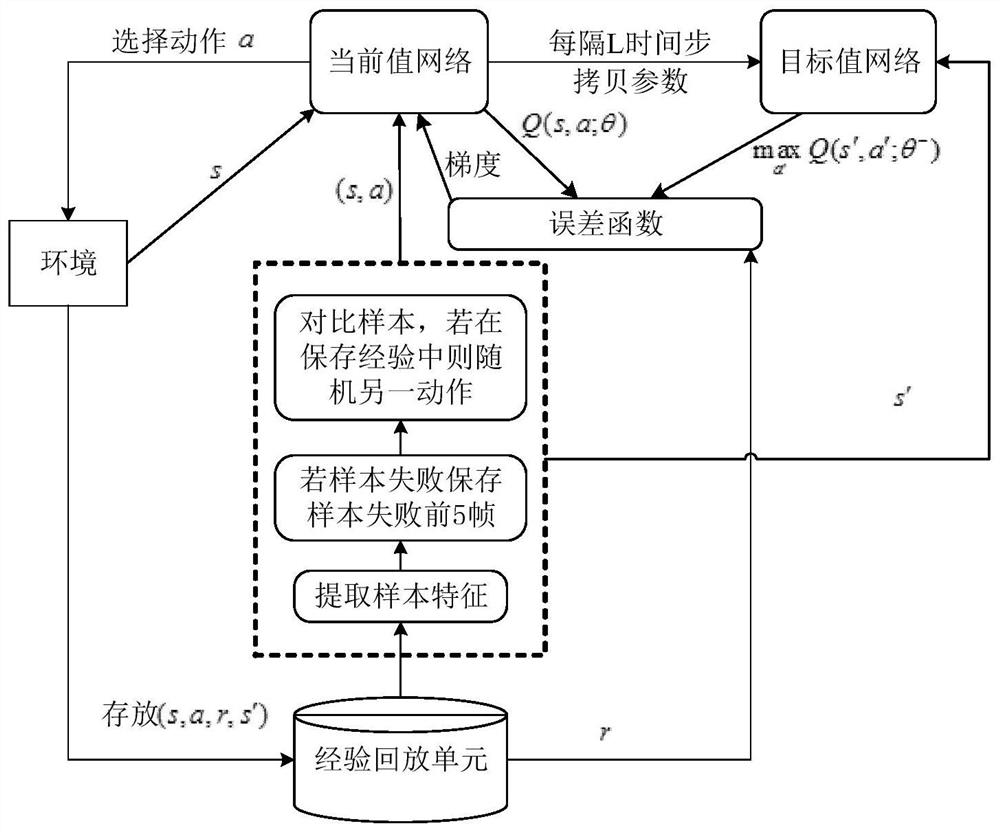
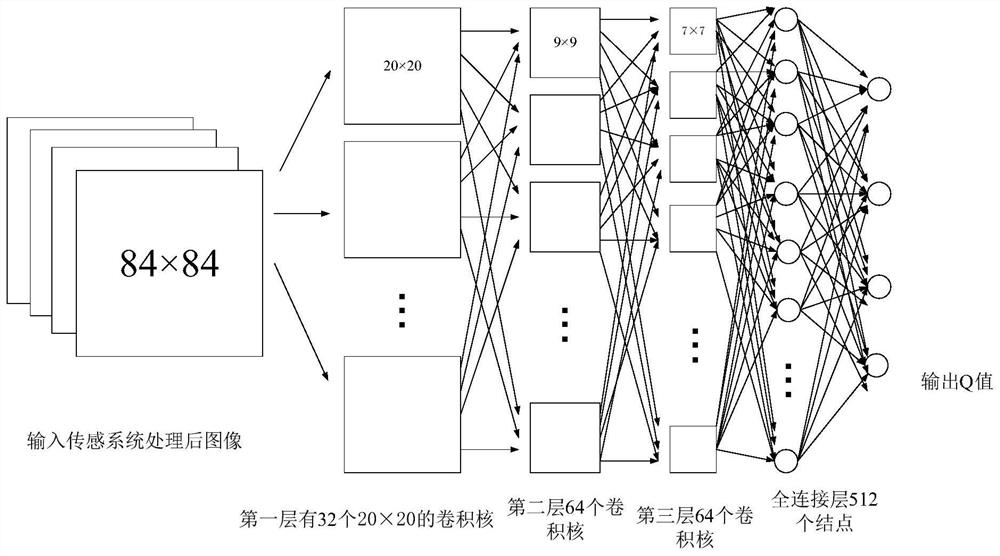
[0031] In this embodiment, the overall control framework is a deep Q-Network (DeepQ-Network, DQN) in deep reinforcement learning, and a Q-learning (Q-Learning) algorithm in the field of reinforcement learning is used for control. Assume that at each time step t=1,2,..., the state of the Markov decision process observed by the unmanned control car sensor syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com