Method and device for optimizing relative precision map, and storage medium
A technology of relative accuracy and absolute accuracy, which is applied to equipment and computer storage media to optimize relative accuracy maps. In the field of methods, it can solve the problems that it is difficult to determine the confidence of the map and the graph model cannot be optimized.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
[0087] According to an embodiment of the present invention, the method further includes: when it is detected that the search threshold is smaller than a predetermined threshold, stop iterative optimization and output an optimized pose graph model.
[0088] Through the two cut-off judgment conditions listed above, when the counted number of iterations reaches the threshold of iterations or the search threshold is less than the predetermined threshold, the iterative optimization is stopped and the optimized pose graph model is output, so as to realize the graph of the relative accuracy map. Model optimization.
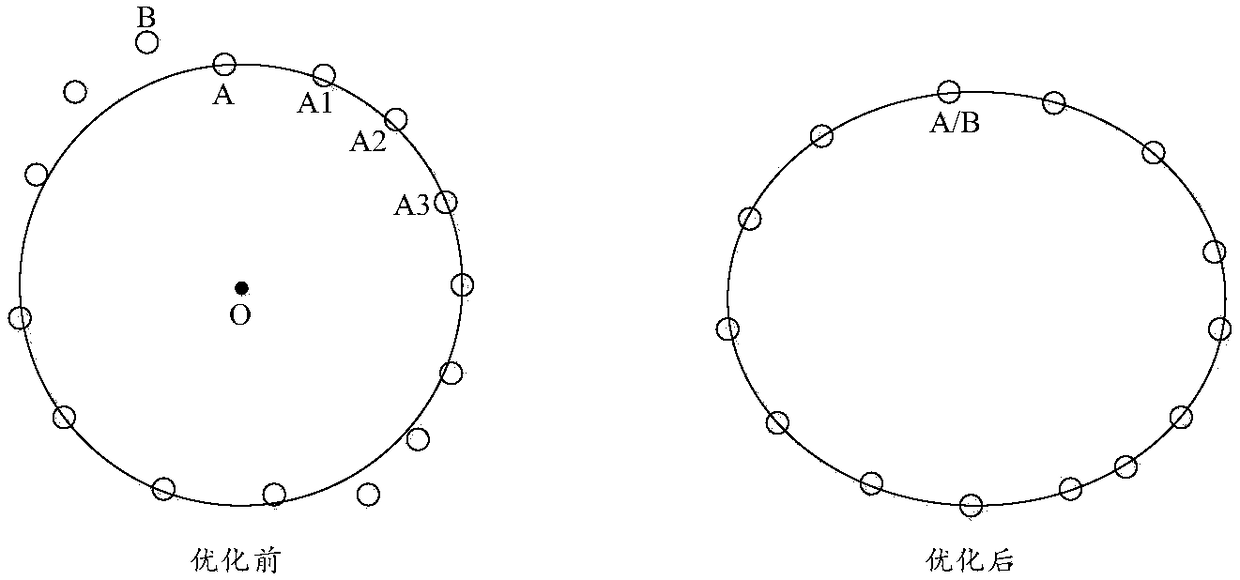
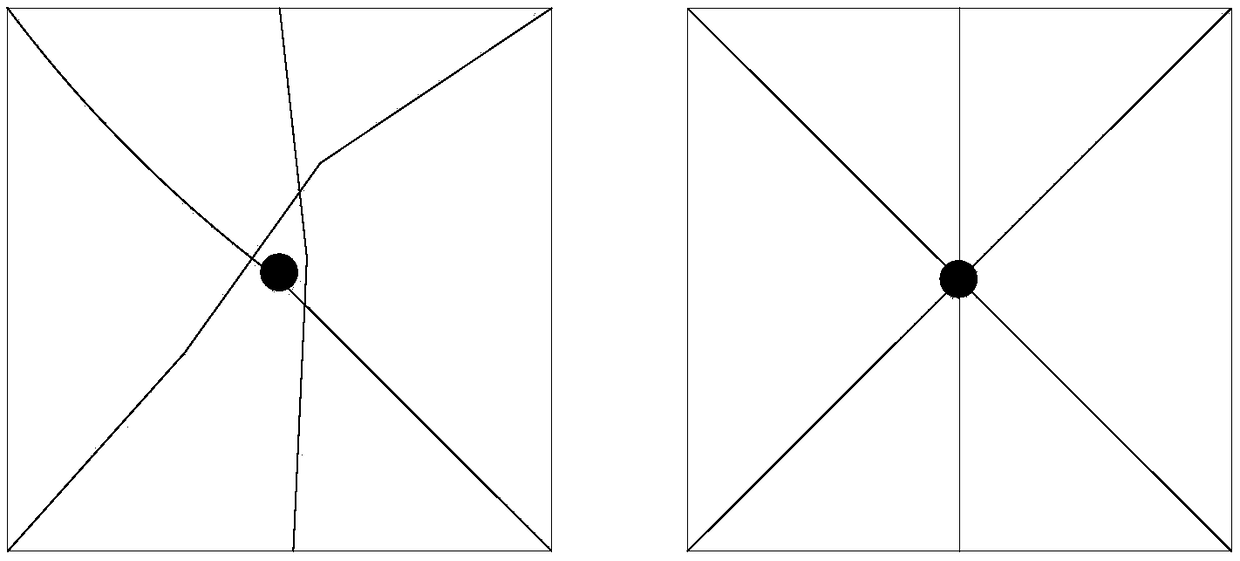
[0089] The method for optimizing the relative accuracy map provided by the present invention is different from traditional methods such as figure 1 Compared to the pose graph model optimization shown, the overall non-closed-loop model can be optimized for map acquisition data.
[0090] Moreover, even if there are multiple batches of maps crossing the same intersection i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com