


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Model adjustment method based on 3D imaging technology and model generation device
An adjustment method and model generation technology, applied in image communication, electrical components, stereo systems, etc., can solve the problem of single function of 3D image shooting terminal, and achieve the effect of multiple display functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
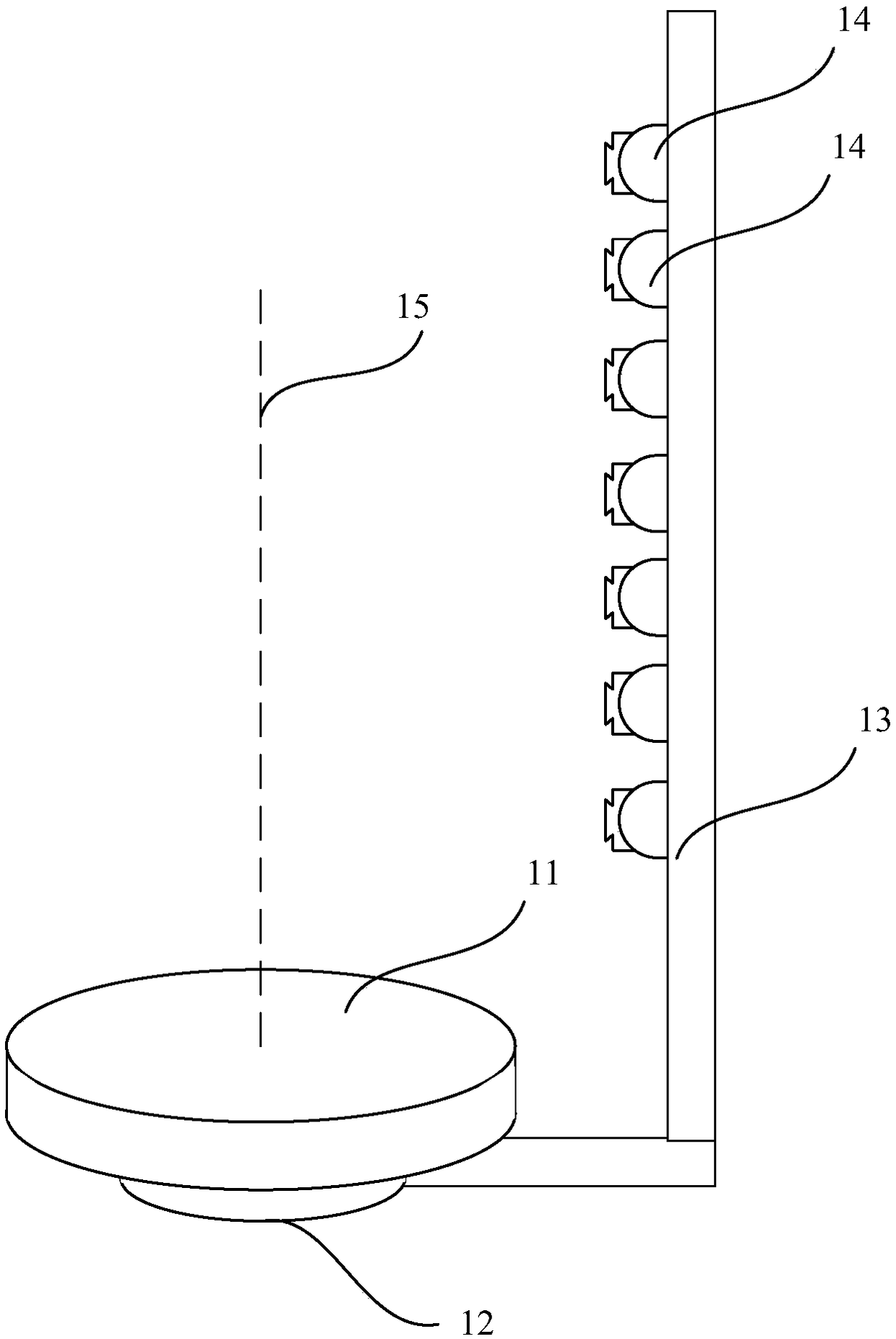
[0041] see figure 1 , the present embodiment provides a model generation device, the model generation device includes a tray 11, a support part 12, a rotating device, a support rod 13, seven 3D cameras 14 and a processing end.
[0042] In this embodiment, the processing end is a computer, and the processing end may also be a cloud server, and the cloud server is used to perform data calculation by transmitting data to the cloud server.
[0043] The tray is installed on the support part through the rotation device, and the tray rotates horizontally on the support part around the axis of the rotation device through the rotation device.
[0044] The support rod is perpendicular to the plane where the pallet is located.
[0045] The seven 3D cameras are vertically arranged side by side on the support rod.
[0046] The shooting direction of the 3D camera is from the 3D camera to a point on the axis 15 .
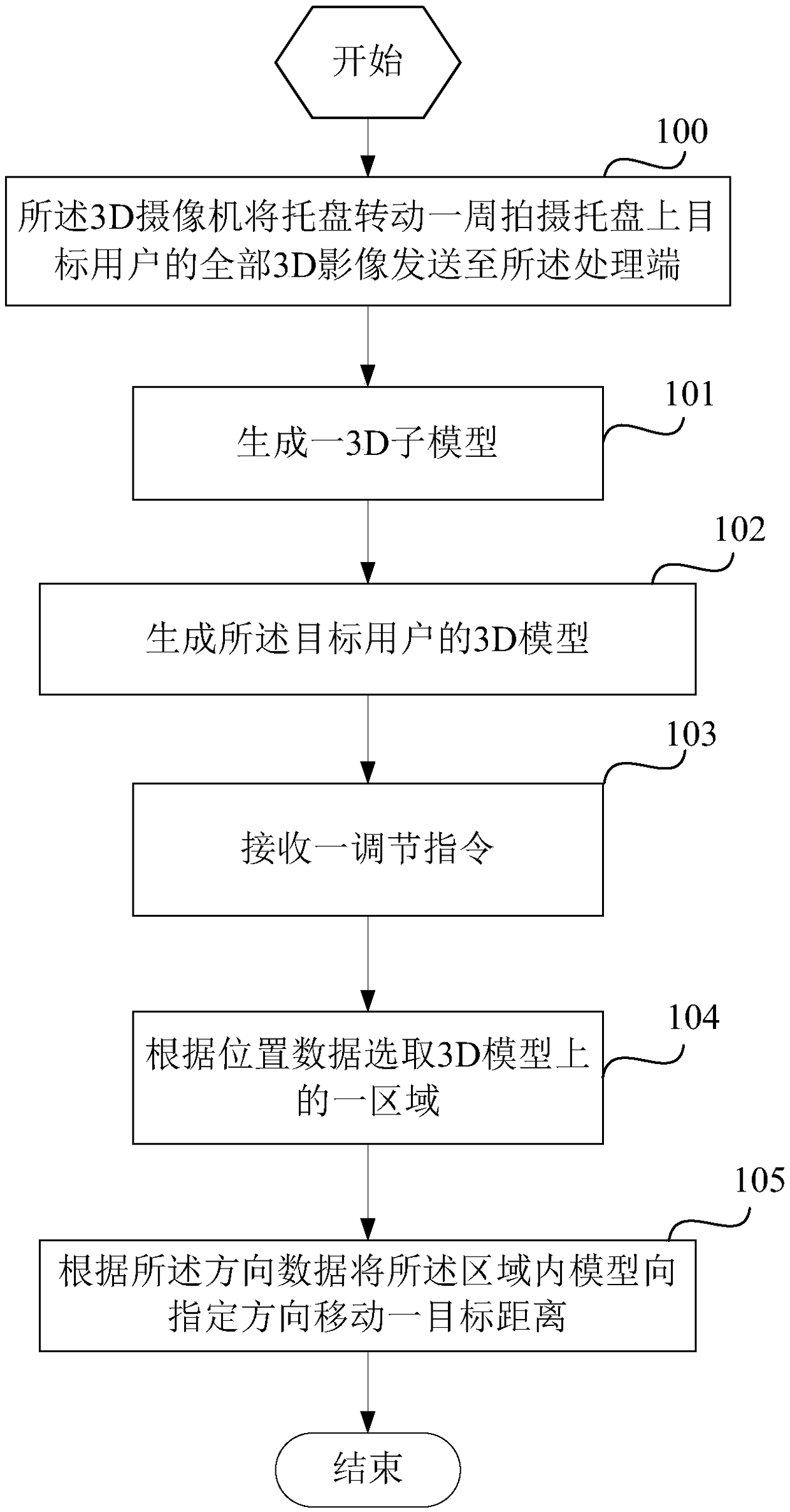
[0047] The 3D camera is used to rotate the tray once to capture all 3D ima...
Embodiment 2
[0072] This embodiment is basically the same as Embodiment 1, the only difference is:
[0073] The processing end is used to move the target model point to the specified direction by the target distance according to the direction data, and then move the model points around the target model point to the specified direction to adjust the distance, each surrounding model point The adjustment distance is passed by Y=-(a X )+b+1, where Y is the adjustment distance greater than 0, X is the distance from the surrounding model points to the target model point, a is a coefficient greater than 1 and less than 2, and b is the target distance.
[0074] Correspondingly, step 105 in Embodiment 1 is replaced by moving the target model point by the target distance in the specified direction according to the direction data, and then moving the model points around the target model point in the specified direction for an adjustment distance, each The adjustment distance of a surrounding model p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com